
using a tft lcd to move a servo manufacturer
In this article, you will learn how to use TFT LCDs by Arduino boards. From basic commands to professional designs and technics are all explained here.
In electronic’s projects, creating an interface between user and system is very important. This interface could be created by displaying useful data, a menu, and ease of access. A beautiful design is also very important.
There are several components to achieve this. LEDs, 7-segments, Character and Graphic displays, and full-color TFT LCDs. The right component for your projects depends on the amount of data to be displayed, type of user interaction, and processor capacity.
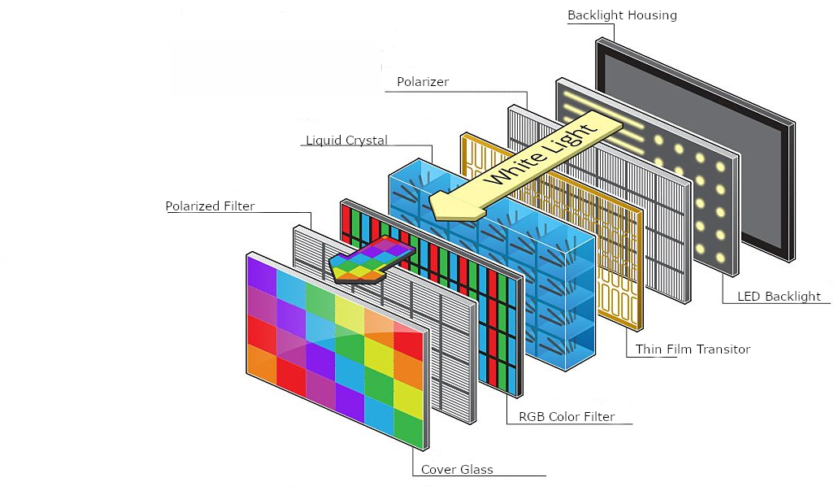
TFT LCD is a variant of a liquid-crystal display (LCD) that uses thin-film-transistor (TFT) technology to improve image qualities such as addressability and contrast. A TFT LCD is an active matrix LCD, in contrast to passive matrix LCDs or simple, direct-driven LCDs with a few segments.
In Arduino-based projects, the processor frequency is low. So it is not possible to display complex, high definition images and high-speed motions. Therefore, full-color TFT LCDs can only be used to display simple data and commands.
In this article, we have used libraries and advanced technics to display data, charts, menu, etc. with a professional design. This can move your project presentation to a higher level.
In electronic’s projects, creating an interface between user and system is very important. This interface could be created by displaying useful data, a menu, and ease of access. A beautiful design is also very important.
There are several components to achieve this. LEDs, 7-segments, Character and Graphic displays, and full-color TFT LCDs. The right component for your projects depends on the amount of data to be displayed, type of user interaction, and processor capacity.
TFT LCD is a variant of a liquid-crystal display (LCD) that uses thin-film-transistor (TFT) technology to improve image qualities such as addressability and contrast. A TFT LCD is an active matrix LCD, in contrast to passive matrix LCDs or simple, direct-driven LCDs with a few segments.
In Arduino-based projects, the processor frequency is low. So it is not possible to display complex, high definition images and high-speed motions. Therefore, full-color TFT LCDs can only be used to display simple data and commands.
In this article, we have used libraries and advanced technics to display data, charts, menu, etc. with a professional design. This can move your project presentation to a higher level.
Size of displays affects your project parameters. Bigger Display is not always better. if you want to display high-resolution images and signs, you should choose a big size display with higher resolution. But it decreases the speed of your processing, needs more space and also needs more current to run.
After choosing the right display, It’s time to choose the right controller. If you want to display characters, tests, numbers and static images and the speed of display is not important, the Atmega328 Arduino boards (such as Arduino UNO) are a proper choice. If the size of your code is big, The UNO board may not be enough. You can use Arduino Mega2560 instead. And if you want to show high resolution images and motions with high speed, you should use the ARM core Arduino boards such as Arduino DUE.
In electronics/computer hardware a display driver is usually a semiconductor integrated circuit (but may alternatively comprise a state machine made of discrete logic and other components) which provides an interface function between a microprocessor, microcontroller, ASIC or general-purpose peripheral interface and a particular type of display device, e.g. LCD, LED, OLED, ePaper, CRT, Vacuum fluorescent or Nixie.
The display driver will typically accept commands and data using an industry-standard general-purpose serial or parallel interface, such as TTL, CMOS, RS232, SPI, I2C, etc. and generate signals with suitable voltage, current, timing and demultiplexing to make the display show the desired text or image.
The LCDs manufacturers use different drivers in their products. Some of them are more popular and some of them are very unknown. To run your display easily, you should use Arduino LCDs libraries and add them to your code. Otherwise running the display may be very difficult. There are many free libraries you can find on the internet but the important point about the libraries is their compatibility with the LCD’s driver. The driver of your LCD must be known by your library. In this article, we use the Adafruit GFX library and MCUFRIEND KBV library and example codes. You can download them from the following links.
You must add the library and then upload the code. If it is the first time you run an Arduino board, don’t worry. Just follow these steps:Go to www.arduino.cc/en/Main/Software and download the software of your OS. Install the IDE software as instructed.
By these two functions, You can find out the resolution of the display. Just add them to the code and put the outputs in a uint16_t variable. Then read it from the Serial port by Serial.println(); . First add Serial.begin(9600); in setup().
First you should convert your image to hex code. Download the software from the following link. if you don’t want to change the settings of the software, you must invert the color of the image and make the image horizontally mirrored and rotate it 90 degrees counterclockwise. Now add it to the software and convert it. Open the exported file and copy the hex code to Arduino IDE. x and y are locations of the image. sx and sy are sizes of image. you can change the color of the image in the last input.
Upload your image and download the converted file that the UTFT libraries can process. Now copy the hex code to Arduino IDE. x and y are locations of the image. sx and sy are size of the image.
In this template, We just used a string and 8 filled circles that change their colors in order. To draw circles around a static point ,You can use sin(); and cos(); functions. you should define the PI number . To change colors, you can use color565(); function and replace your RGB code.
In this template, We converted a .jpg image to .c file and added to the code, wrote a string and used the fade code to display. Then we used scroll code to move the screen left. Download the .h file and add it to the folder of the Arduino sketch.
In this template, We used sin(); and cos(); functions to draw Arcs with our desired thickness and displayed number by text printing function. Then we converted an image to hex code and added them to the code and displayed the image by bitmap function. Then we used draw lines function to change the style of the image. Download the .h file and add it to the folder of the Arduino sketch.
In this template, We created a function which accepts numbers as input and displays them as a pie chart. We just use draw arc and filled circle functions.
In this template, We added a converted image to code and then used two black and white arcs to create the pointer of volumes. Download the .h file and add it to the folder of the Arduino sketch.
In this template, We added a converted image and use the arc and print function to create this gauge. Download the .h file and add it to folder of the Arduino sketch.
while (a < b) { Serial.println(a); j = 80 * (sin(PI * a / 2000)); i = 80 * (cos(PI * a / 2000)); j2 = 50 * (sin(PI * a / 2000)); i2 = 50 * (cos(PI * a / 2000)); tft.drawLine(i2 + 235, j2 + 169, i + 235, j + 169, tft.color565(0, 255, 255)); tft.fillRect(200, 153, 75, 33, 0x0000); tft.setTextSize(3); tft.setTextColor(0xffff); if ((a/20)>99)
while (b < a) { j = 80 * (sin(PI * a / 2000)); i = 80 * (cos(PI * a / 2000)); j2 = 50 * (sin(PI * a / 2000)); i2 = 50 * (cos(PI * a / 2000)); tft.drawLine(i2 + 235, j2 + 169, i + 235, j + 169, tft.color565(0, 0, 0)); tft.fillRect(200, 153, 75, 33, 0x0000); tft.setTextSize(3); tft.setTextColor(0xffff); if ((a/20)>99)
In this template, We display simple images one after each other very fast by bitmap function. So you can make your animation by this trick. Download the .h file and add it to folder of the Arduino sketch.
In this template, We just display some images by RGBbitmap and bitmap functions. Just make a code for touchscreen and use this template. Download the .h file and add it to folder of the Arduino sketch.
The speed of playing all the GIF files are edited and we made them faster or slower for better understanding. The speed of motions depends on the speed of your processor or type of code or size and thickness of elements in the code.

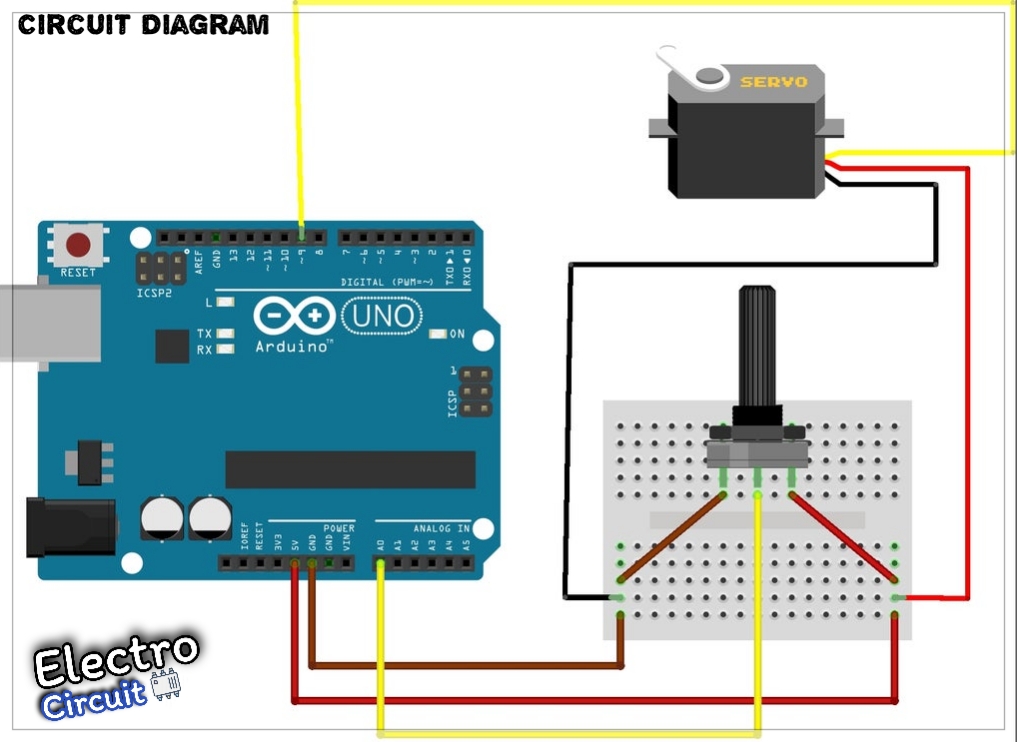
Let’s take a look into a simple interfacing project this time. This is actuator interfacing with Arduino Uno and the actuator being servo motor, specifically SG90 servo motor. SG90 is a lightweight (just 9g) and tiny servo motor which has quite good output toque. We can use Arduino IDE to code this servo and control its movements precisely. We can rotate 180 with this servo motor.
This project uses SG90 servo motor interfaced with Arduino Uno which is programed to turn the servo motor from 0 degrees to 180 degrees and back to 0 degrees.
For demo purposes, with zero load on the servo motor, we are powering the servo motor using Arduino 5V pin. But it is important to keep in mind that the motor should be powered separately. This servo motor has input voltage of 4.8V to 6V DC. It is recommended that the servo motor should be powered externally (using a dedicated power supply) and the voltage should be within the accepted range. The maximum current draw from Arduino is 0.8A only. So when we use an external power supply, it will make sure that the Arduino board won’t be damaged due to excess current draw.
There is a common problem when dealing with SG90 (or even MG90S) that is the overshooting or undershooting. This is a problem has a bit to do with Control Systems. In general, we can say, the systems that are overdamped miss the target value, that causes the “undershoot”. This means, the servo would not really reach 0 to 180 degrees or other specified value. Whereas those systems that are underdamped go over the target. This causes the situation to “overshoot”. This is when the servo motor exceeds the specified degree and sweeps more area than it is supposed to do.
There are a couple of fixes available online for this overshoot/undershoot problem. You could use a better servo motor like “Tower pro MG 995” servos. This is not a micro servo like SG90 but it is more precise and it can also deliver more power. There are other servo motors that are used for model aircraft building; they are known to be more precise. They give very good results but are quite expensive. If you really want to use SG90 servo motor only and get precise degree turn, then, consider the following points to get better results:
The circuit connections for this project are very simple as the servo motor has only 3 pins. The red wire of the servo goes to 5V pin of Arduino Uno. The Black wire of the servo goes to Arduino Uno’s ground pin (GND). And the yellow wire (called the control pin of servo) goes to Arduino pin 8. This completes the circuit connections of the servo motor with Arduino Uno.
First, we need to include a library called “Servo.h” to be able to control various servo motors. If you don’t already have this library in your Arduino IDE, then you can go to “tools” à “Manage Libraries…” and type “Servo” in the Library Manager and install the one from “Michael Margolis, Arduino”.
Next, we declare a variable called “servo”. In void setup function, we use the servo.attach function to tell the Arduino board that the control pin of the servo motor is attached to pin 8 of Arduino (the function attaches the servo variable to the pin). The servo.write function is used to tell the servo the degree to which it should turn. At the beginning the default state of servo is considered as zero degree we keep this as origin position that is zero degrees. So we write servo.write(0). Then a delay function is used to create a delay of 2ms.
Next, in void loop, we use the servo.write function again to tell the servo to turn to 180 degrees and the delay function will hold this position for 1ms. Then the servo is instructed again to go back to 0 degrees, as we had initialized before. The delay function will hold this position for 1ms. This is repeated until the power is disconnected or servo is disconnected.
This is a beginner friendly project. It focuses on controlling an actuator, SG90 Servo motor, using Arduino Uno and Arduino IDE. It provides a strong basic foundation in dealing with actuators and helps beginners jump into more fun with actuators.

Note: The following picture is the connection diagram of the 2.8-inch TFT screen and Arduino uno, but this product is connected in exactly the same way.
If the Arduino board has an ICSP interface, set the SPI Config switch on the display module to the ICSP direction (by default) (the company"s Arduino UNO motherboard has an ICSP interface, just plug it in directly.).
This product uses the same LCD control chip and touch panel control chip as the 3.5-inch TFT screen of the same series of our company, so the code is completely compatible. The following takes 3.5-inch TFT as an example to introduce.
LCD_Show can display colorful patterns with different shapes and times. LCD_ShowBMP is for displaying the picture in BMP, and LCD_Touch is for using the touching function.
The display controller used in this product is ILI9486, and we need to initialize the controller through the SPI communication protocol, and the initialization functions are written in LCD_Driver.cpp.
The function functions related to the screen display are written in LCD_GUI.cpp. The function of each function and the parameters passed are explained in the source code. You can call it directly when you need to use it.
Before using LCD_ShowBMP to display pictures, first copy the pictures in the PIC folder in the data to the root directory of the SD card (you should understand that in the root directory, that is to save the pictures directly to the SD card, do not put them in any subfolders folder.).
Here is an explanation. This demo shows that the BMP picture first reads the picture data in the BMP format in the SD card through the SPI protocol, and then displays the data as an image.
These functions are all written in LCD_Bmp.cpp. In fact, the image data in BMP format with a specific file name is read from the SD card, and then the display function written by us is called to re-express the data as an image.
No matter which platform this method is on, the principle is similar. Interested friends can check the relevant information and study the relevant code carefully.
After running this demo, there are five colors on the right side of the screen. Black is the default color in the system, and you can touch it to choose the brush color. Click AD button, and click the red "+" to calibrate the screen with the prompts. Click the right corner "CLEAR" to clear the drawing board.
If you need characters in different sizes and fonts, you can generate the font library you want according to the font extraction software provided in the Resource.
In fact, you can also use Image2Lcd image modulo software to convert images of different sizes and formats into array data, and then use the functions we wrote to display them.
The data sheets of all control chips are given in the information for your reference. If you want to know more about why the underlying functions are written like this, go to the data sheets and look at them!
The demo has been tested on XNUCLEO-F103RB, just insert XNUCLEO-F103RB as shown below. The model of XNUCLEO-F103RB is STM32F103RBT6. If you need to port the program, please connect it according to the actual pin and the schematic diagram.
Note: The following picture is the connection diagram of the 2.8-inch TFT screen and XNUCLEO-F103RB, but this product is connected in exactly the same way.
The demos are developed based on the HAL library. Download the program, find the STM32 program file directory, and open STM32\XNUCLEO-F103RB\lcd4in-demo\MDK-ARM\ lcd4in-demo.uvprojx.
This product uses the same LCD control chip and touch panel control chip as the 3.5-inch TFT screen of the same series of our company, so the code is completely compatible. The following takes 3.5-inch TFT as an example to introduce.
After running the demo, it displays some characters and patterns at first, then displays four pictures, and finally displays the touch sketchpad function. Actually, three projects in the Arduino platform code are integrated in the main function, we place the three main functions in sequence and place TP_DrawBoard(); in an infinite loop to achieve the above functions.
Before using LCD_ShowBMP to display pictures, copy the pictures in the PIC folder in the data to the root directory of the SD card, and then insert the SD card into the SD card slot on the back of the screen to start the download program verification.
It should be noted here that the SD card should be in the FAT format, and the picture should be 480*320 pixels with 24-bit color depth and BMP format.
If you need characters of different sizes and fonts, you can generate the font library you want according to the font extraction software provided in the data.
In fact, you can also use Image2Lcd image modulo software to convert images of different sizes and formats into array data, and then use the functions we wrote to display them.
The data sheets of all control chips are given in the information for your reference. If you want to know more about why the underlying functions are written like this, go to the data sheets and look at them!

This tutorial is a part of series of tutorials on pwm(pulse width modulation) signal generation with stm32f103 microcontroller. Previously we looked upon how to generate pwm signal with stm32 microcontroller using keil uvision 5 ide and stm32cubemx code configurator. We moved forward on generating variable pwm signal using internal timers of stm32f103 microcontroller. We studied about generating pwm, now its time to put it in to practical and control a peripheral with the pwm signal. I decided to control a simple toy servo motor with stm32f103 microcontroller. I used two servo motors in the project for testing the code. First i used tower pro SG-90 servo motor. This motor does well but it did not move its arm at right position there is always some degrees of tolerance in actual results. You can buy one at fairly $3 price. Another motor which i just tested is HS-785HB it properly turns but requires more power(current). For this tutorial i recomend to use tower pro sg90 servo motor due to lower power consumption and simplicity.
Servo motors are small motors unlike size they possess greater torque and can move heavy loads. Their small size possessing high torque made them popular among toy makers. Many toys that are around us contains servo motors in them along with dc motors. Normally servo motors in ideal state consumes little power but during load moving power shoots off and servos start consuming greater amount of current.
Servo motors works on pwm(pulse width modulated) signals. They have an arm/armature which rotates when sufficient voltage, current and pwm signal is applied to motor. When arm rotates it moves every thing that comes in its ways.
Not every servo motor can move heavy loads. It depends on their specifications and details. Normally toy servo motors can move loads from 1 kg up to 12 kg. Their are two types of servo motors DC and AC. Ac servo motors can move even mush heavier loads they are used in industrial applications. DC servo motors are best for small projects. In this project i am also using a DC servo motor with stm32 microcontroller.
As you learned servo motors work on pwm signal. Most of the dc servo motors require 50 Hz frequency for operation with variable duty cycle. Below is the standard requirement wave forms. Our motor also require the same pattern.
At period 20 milli seconds and duty cycle 2 milli seconds servo motor arm moves to 180 degree. At duty cycle 1.5 milli seconds arm moves to 90 degree and at duty cycle 1 milli seconds arm rotates to 0 degree.
I am going to interface servo with stm32f103c8t6 microcontroller. I purchased a pre assembled and cheap board which mounts the microcontroller on it. For rotating the arm of servo motor three pins of microcontroller are used as input. For outputting pwm signal one pin is used. Port-A pins 0,1 and 2 are used as inputs and Port-B pin#6 is used to output the pwm signal.
Stm32f103 microcontroller works on 3.3 volts where as servo motor tower pro sg90 works on 5 volts. So both modules motor and microcontroller must be powered with different power sources. We can not drive servo directly with stm32 output pwm signal because its in 3.3v wave form and motor requires 5v. I inserted a circuit in between the two modules to converted 3.3v to 5v. First transistor is converting the input signal to output 5v but the signal is inverted. Another transistor inverts the inverted signal and brings it back to original logic. So now 3.3v at input cross-ponds to 5v at output to servo motor.
In the above circuit make sure to common the grounds of both motor and microcontroller power supply. You can also use ULN2003 IC here instead of the two transistors. ULN2003 contains the same circuit in it with fly wheeling diodes.
I am going to output pwm signal on PB6. For this you have to do some settings in stm32cubemx ide. Like selecting the channel and configuring some other things. Before moving any forward i would like you to take a simple tutorial on pwm pin selection and duty cycle calculation formula.
The above tutorial is very important to understand the code flow and settings below. Internal stm32 microcontroller oscillator is used in the project. Though the board has an external 8 MHz oscillator but i preferred to use internal. Final clock to timer 4 is 1 MHz.
Then i calculated the values for counter register and other values required to input in the timer-4 configuration. You can see the formula and other values calculations in the above tutorial.
My counter period is 1000. It means at 1000 the pwm duty cycle will be 100% with period 20 milli seconds or 50 Hz frequency. At 500 pwm duty cycle will be 50% which translates to 10 milli seconds. At 5% it will be 1 milli second and at 10% it will be 2 milli seconds and at 7.5% it will be 1.5 milli seconds.
This counter value is used in code to move the servo motor arm. Below is the code.When button-3 is pressed motor moves to 180 degrees. When button-2 is pressed button rotates to 90 degree and when button-1 is pressed it comes back to 0 degrees.
Download the project code. Code is written in keil uvision 5 ide. Stm32cubemx is used for microcontroller configuration. Code folder contains all keil and stm32cubemx files. Code is open source you can modify and use it according to your needs. Please provide us your feed back on the project.

We have used Liquid Crystal Displays in the DroneBot Workshop many times before, but the one we are working with today has a bit of a twist – it’s a circle! Perfect for creating electronic gauges and special effects.
LCD, or Liquid Crystal Displays, are great choices for many applications. They aren’t that power-hungry, they are available in monochrome or full-color models, and they are available in all shapes and sizes.
Today we will see how to use this display with both an Arduino and an ESP32. We will also use a pair of them to make some rather spooky animated eyeballs!
Waveshare actually has several round LCD modules, I chose the 1.28-inch model as it was readily available on Amazon. You could probably perform the same experiments using a different module, although you may require a different driver.
There are also some additional connections to the display. One of them, DC, sets the display into either Data or Command mode. Another, BL, is a control for the display’s backlight.
The above illustration shows the connections to the display. The Waveshare display can be used with either 3.3 or 5-volt logic, the power supply voltage should match the logic level (although you CAN use a 5-volt supply with 3.3-volt logic).
Another difference is simply with the labeling on the display. There are two pins, one labeled SDA and the other labeled SCL. At a glance, you would assume that this is an I2C device, but it isn’t, it’s SPI just like the Waveshare device.
This display can be used for the experiments we will be doing with the ESP32, as that is a 3.3-volt logic microcontroller. You would need to use a voltage level converter if you wanted to use one of these with an Arduino Uno.
The Arduino Uno is arguably the most common microcontroller on the planet, certainly for experiments it is. However, it is also quite old and compared to more modern devices its 16-MHz clock is pretty slow.
The Waveshare device comes with a cable for use with the display. Unfortunately, it only has female ends, which would be excellent for a Raspberry Pi (which is also supported) but not too handy for an Arduino Uno. I used short breadboard jumper wires to convert the ends into male ones suitable for the Arduino.
Once you have everything hooked up, you can start coding for the display. There are a few ways to do this, one of them is to grab the sample code thatWaveshare provides on their Wiki.
The Waveshare Wiki does provide some information about the display and a bit of sample code for a few common controllers. It’s a reasonable support page, unfortunately, it is the only support that Waveshare provides(I would have liked to see more examples and a tutorial, but I guess I’m spoiled by Adafruit and Sparkfun LOL).
Open the Arduino folder. Inside you’ll find quite a few folders, one for each display size that Waveshare supports. As I’m using the 1.28-inch model, I selected theLCD_1inch28folder.
Once you do that, you can open your Arduino IDE and then navigate to that folder. Inside the folder, there is a sketch file namedLCD_1inch28.inowhich you will want to open.
When you open the sketch, you’ll be greeted by an error message in your Arduino IDE. The error is that two of the files included in the sketch contain unrecognized characters. The IDE offers the suggestion of fixing these with the “Fix Encoder & Reload” function (in the Tools menu), but that won’t work.
The error just seems to be with a couple of the Chinese characters used in the comments of the sketch. You can just ignore the error, the sketch will compile correctly in spite of it.
The code is pretty basic, I’m not repeating all of it here, as it consists of several files. But we can gather quite a bit of knowledge from the main file, as shown here.
You can see from the code that after loading some libraries we initialize the display, set its backlight level (you can use PWM on the BL pin to set the level), and paint a new image. We then proceed to draw lines and strings onto the display.
Unfortunately, Waveshare doesn’t offer documentation for this, but you can gather quite a bit of information by reading theLCD_Driver.cppfile, where the functions are somewhat documented.
After uploading the code, you will see the display show a fake “clock”. It’s a static display, but it does illustrate how you can use this with the Waveshare code.
This library is an extension of the Adafruit GFX library, which itself is one of the most popular display libraries around. Because of this, there isextensive documentation for this libraryavailable from Adafruit. This makes the library an excellent choice for those who want to write their own applications.
As with the Waveshare sample, this file just prints shapes and text to the display. It is quite an easy sketch to understand, especially with the Adafruit documentation.
The sketch finishes by printing some bizarre text on the display. The text is an excerpt from The Hitchhiker’s Guide to the Galaxy by Douglas Adams, and it’s a sample of Vogon poetry, which is considered to be the third-worst in the Galaxy!
Here is the hookup for the ESP32 and the GC9A01 display. As with most ESP32 hookup diagrams, it is important to use the correct GPIO numbers instead of physical pins. The diagram shows the WROVER, so if you are using a different module you’ll need to consult its documentation to ensure that you hook it up properly.
The TFT_eSPI library is ideal for this, and several other, displays. You can install it through your Arduino IDE Library Manager, just search for “TFT_eSPI”.
There is a lot of demo code included with the library. Some of it is intended for other display sizes, but there are a few that you can use with your circular display.
To test out the display, you can use theColour_Test sketch, found inside the Test and Diagnostic menu item inside the library samples. While this sketch was not made for this display, it is a good way to confirm that you have everything hooked up and configured properly.
A great demo code sample is theAnimated_dialsketch, which is found inside theSpritesmenu item. This demonstration code will produce a “dial” indicator on the display, along with some simulated “data” (really just a random number generator).
In order to run this sketch, you’ll need to install another library. Install theTjpeg_DecoderLibrary from Library Manager. Once you do, the sketch will compile, and you can upload it to your ESP32.
One of my favorite sketches is the Animated Eyes sketch, which displays a pair of very convincing eyeballs that move. Although it will work on a single display, it is more effective if you use two.
The first thing we need to do is to hook up a second display. To do this, you connect every wire in parallel with the first display, except for the CS (chip select) line.
You can also hook up some optional components to manually control the two “eyeballs”. You’ll need an analog joystick and a couple of momentary contact, normally open pushbutton switches.
The Animated Eyes sketch can be found within the sample files for the TFT_eSPI library, under the “generic” folder. Assuming that you have wired up the second GC9A01 display, you’ll want to use theAnimated_Eyes_2sketch.
The GC9A01 LCD module is a 1.28-inch round display that is useful for instrumentation and other similar projects. Today we will learn how to use this display with an Arduino Uno and an ESP32.
Touchscreen displays are everywhere! Phones, tablets, self-serve kiosks, bank machines and thousands of other devices we interact with make use of touchscreen displays to provide an intuitive user interface.
Today we will learn how touchscreens work, and how to use a common inexpensive resistive touchscreen shield for the Arduino. Future videos and articles will cover capacitive touchscreens, as well as a touchscreen HAT for the Raspberry Pi.
Although touchscreens seem to be everywhere these days we tend to forget that just a few decades ago these devices were just science fiction for most of us. For many people, the touchscreen concept was introduced 30 years ago in the television seriesStar Trek: The Next Generation.
Eric A Johnson, a researcher at the Royal Radar Establishment in Malvern UK is credited for describing and then prototyping the first practical touchscreen. HIs device was a capacitive touchscreen, and it’s first commercial use was on air traffic control screens. However, the touchscreens used then were not transparent, instead, they were mounted on the frame of the CRT display.
In 1972, a group at the University of Illinois filed for a patent on an optical touchscreen. This device used a 16×16 array of LEDs and phototransistors, mounted on a frame around a CRT display. Placing your finger, or another solid object, on the screen would break two of the light beams, this was used to determine the position and respond accordingly.
The first transparent touchscreen was developed atCERNin 1973. CERN is also home to the Large Hadron Collider, and this is where Tim Berners-Lee invented the World Wide Web.
The first resistive touchscreen was developed by American inventor George Samuel Hurst in 1975, although the first practical version was not produced until 1982.
In 1982 theUniversity of Toronto’sInput Research Group developed the first multi-touch touchscreen, a screen that could interpret more than one touch at the same time. The original device used a video camera behind a frosted piece of glass. Three years later the same group developed a multi-touch tablet that used a capacitive touchscreen instead.
The first commercial product to use a touchscreen was a point-of-sale terminal developed by Atari and displayed at the 1986 COMDEX expo in Las Vegas. The next year Casio launched theCasio PB-1000 pocket computerwith a touchscreen consisting of a simple 4×4 matrix.
LG created the world’s first capacitive touchscreen phone, theLG Pradaused a capacitive touchscreen and was released in early 2007. A few weeks later Apple released its first iPhone.
Most early touchscreen devices were resistive, as this technology is generally less expensive than capacitive screens. However, nowadays capacitive screens are more common, being used in the majority of smartphones and tablets.
Although they were invented after capacitive touchscreens, resistive touchscreens are probably the most common type used by hobbyists. The reason for that is the price and performance, resistive touchscreens are cheaper than capacitive ones and they are generally more accurate.
A resistive touchscreen consists of two thin layers of material, separated by a tiny gap. Spacers are used to maintain the gap and keep the two sheets apart.
Both sheets have a conductive side, and they are arranged so that the conductive sides face one another. The top sheet is both flexible and transparent. The bottom one is also transparent, however, it is usually solid.
In operation, the resistance between the two sheets is measured at different points. Pressing down upon the tip sheet will change that resistance, and by comparing the measurement points it can be determined where the screen was pressed. Essentially, it creates a pair of voltage dividers.
In a 4-Wire Analog touchscreen, there are two electrodes or “busbars” on each of the conductive layers. On one layer these electrodes are mounted on the two X-axis sides, the other layer has them on the two y-axes.
This is the most inexpensive method of designing a resistive touchscreen. The touchscreen display that we will be working with today uses this arrangement.
In a 5-Wire Analog touchscreen, there are four wires, one connected to a circular electrode on each corner of the bottom layer. A fifth wire is connected to a “sensing wire”, which is embedded in the top layer.
Touching any point on the screen causes current to flow to each of the bottom electrodes, measuring all four electrode currents determines the position that the screen was touched.
This 8-Wire Analog touchscreen uses an arrangement of electrodes identical to the 4-Wire variety. The difference is that there are two wires connected to each electrode, one to each end.
Capacitive touchscreens are actually older technology than resistive displays. They are commonly used in phones and tablets, so you’re probably familiar with them.
The capacitive touchscreen makes use of the conductivity of the human body. The touchscreen itself consists of a glass plate that has been treated with a conductive material.
The surface capacitive touchscreen is the most inexpensive design, so it is widely used. It consists of four electrodes placed at each corner of the touchscreen, which maintain a level voltage over the entire conductive layer.
When your finger comes in contact with any part of the screen, current flows between those electrodes and your finger. Sensors positioned under the screen sense the change in voltage and the location of that change.
This is a more advanced touchscreen technique. In a projected capacitive touchscreen transparent electrodes are placed along the protective glass coating and are arranged in a matrix.
One line of electrodes (vertical) maintain a constant level of current. Another line (horizontal) are triggered when your finger touches the screen and initiates current flow in that area of the screen. The electrostatic field created where the two lines intersect determine where it was touched.
The module we will be experimenting with today is a very common Arduino Shield, which is rebranded by many manufacturers. You can easily find these on Amazon, eBay or at your local electronics shop.
You can also just use the shield as an LCD display and ignore the two other components, however, if you intend on doing that it would be cheaper just to buy an LCD display without any touchscreen features.
This is a TFT orThin Film Transistordevice that uses liquid crystals to produce a display. These displays can produce a large number of colors with a pretty decent resolution.
You do need to be looking directly at the display for best color accuracy, as most of these inexpensive LCD displays suffer from distortion and “parallax error” when viewed from the side. But as the most common application for a device like this is as a User Interface (UI) this shouldn’t be a problem.
This shield uses a 4-wire analog resistive touchscreen, as described earlier. Two of the wires (one X and one Y) are connected to a couple of the analog inputs on the Arduino. The analog inputs are required as the voltage levels need to be measured to determine the position of the object touching the screen.
The microSD card socket is a convenience, it’s normally used for holding images for the display but it can also be used for program storage. This can be handy for holding things like calibration settings and favorite selections.
You should note that the microSD card uses the SPI interface and is wired for the Arduino Uno. While the rest of the shield will function with an Arduino Mega 2560, the SPI connections on the Mega are different, so the microSD card will not work.
The last paragraph regarding the microSD card may make you think that an Arduino Uno is the best choice for the Touchscreen Display Shield. And it you require the microSD card then it probably is a good choice.
But using an Arduino Uno with this shield does have one big disadvantage – a limited number of free I/O pins. In fact there are only three pins left over once the card has been plugged in:
If your product is self-contained and doesn’t need many (or any) I/O pins then you’ll be fine. But if you need more pins to interface with then an Arduino Mega 2560 is a much better choice. It has a lot of additional analog and digital pins.
So if you don’t require the microSD card, or are willing to hook up a separate microSD card, then the Arduino Mega 2560 is a better choice for most applications.
As there are three devices on the shield you will need libraries for each of the ones you want to use. TheSD Libraryis already installed in your Arduino IDE, so you will just need libraries for the display and touchscreen.
For the LCD you will have a lot of choices in libraries. Most of these shields come with a CD ROM with some sketches and libraries, so you can use the LCD libraries there. Bear in mind however that code on these CD ROMs tends to be a little dated, you may have better lick on the vendors website.
This useful resource contains code, libraries and datasheets for a wealth of LCD displays, both touchscreen and non-touchscreen. You’ll also find code for some common OLED displays as well.
I ran my touchscreen through all of the code samples I obtained from the LCD Wiki. It’s an interesting exercise, and by examining the sketch for each demo you can learn a lot about programming the display.
The first example is a very simple color “sweep” test. Navigate to theExample_01_Simple_testfolder and open the folder for your Arduino controller. Navigate down until you find the “ino” file and load it.
This test does not make use of any of the extra libraries, it drives the LCD directly. It is only a test of the LCD display, it does not make use of the touchscreen membrane.
You’ll find this example in theExample_02_clear_screenfolder, the sameclear_Screen.inoexample is used for both the Uno and Mega so there are no separate folders.
This example does use the custom libraries, and is a very good way to learn how to use them. You’ll note that theLCDWIKI_GUI.hlibrary is loaded, which is the graphics library for the LCD display.
Another library, LCDWIKI_KBV.h, is loaded as well. This is a hardware-specific “helper” library that provides an interface to the actual hardware for the other libraries.
When you run this example the results will be similar to the first one, a series of colors will sweep across the screen. In this case the colors are different, and they vary in speed.
A look at the loop will show how this is done. TheLCDWIKI_GUI.hlibrary has a “Fill_Screen” method that fills the screen with an RGB color. You can specify the color in both hexadecimal or decimal format, the example illustrates both ways.
The example itself is in a folder labeled “Example_03_colligate_test” and the code itself is in the colligate_test.ino file. I suspect a translation error resulted in the name!
This sketch uses a number of functions from theLCDWIKI_GUI.hlibrary, along with some custom functions to draw geometric shapes. It then displays a cycle of graphs, shapes, and patterns on the LCD display.
One way in which this sketch differs is that most of the graphics routines are executed in the Setup function, so they only run once. The loop then displays some text with a selection of colors and fonts. The orientation is changed as it cycles through the loop.
This example makes use of a second file that contains fonts. The Display Scroll sketch illustrates a number of different methods of scrolling characters, in different fonts, colors and even languages.
One interesting thing about this test is that it illustrates how to display text in different “aspects”, Portrait and Landscape, Right side up and Reversed.
Unlike the previous examples that put the text in with a number of graphics, this example is a pretty simple one with just a block of text in different sizes and colors. This makes it very simple to understand how the text is positioned on the display.
The result of running the sketch is the display screen fills with rows of hexadecimal values while the background alternates between blue and black and the orientation (or “aspect”) changes. If you stand back to see the “big picture” you’ll note that the color values form “number patterns”.
The Display Phone Call sketch draws a mockup telephone keypad. Pressing one of the keys will display the result on a line of text at the top. There is also a key to delete your entries, as well as ones to send and disconnect the call – the latter two are “dummy” functions of course as it’s only a demo.
In addition to the graphics and “helper” libraries that have been used in the previous examples this sketch also uses theTouchScreenlibrary to read screen interaction. This was one of the libraries included in the original ZIP file.
As its name would imply, this sketch displays a bitmap image on the display. The images need to be placed onto the root of a microSD card, which in turn is plugged into the socket on the display shield.
Note that this demo will only work on the Arduino Uno, as the microSD card uses the SPI bus and is wired to the Arduino Uno SPI port. The Arduino Mega 2560 board uses different pins for SPI.
The image needs to be in bitmap format as this format defines several bytes for each individual pixel in the image. There are four 320×480 sample images included in the code sample, you can also use your own if you (a) keep them the same size and (b) give them the same names.
The images will show off the display resolution, which is reasonably impressive. You’ll also note that to see them at their best, you need to be directly in front of the display, viewing the display at an angle causes the display to distort colors.
Another thing you will notice is the speed at which the images draw, which is not particularly impressive. The clock speed of the Arduino has a lot to do with this, as does the method used to extract each individual pixel from the image.
This example draws some small “switches” on the display. The switches are active and respond to touch. There are slide switches, a push button, some radio buttons and some text-based expandable menus to test with.
The Touch Pen example is actually a pretty decent little drawing application. You can draw whatever you want on the main screen area. A set of buttons allow you to set the stylus color and pen width.
While the sample code is a bit difficult to follow it’s worth the effort, as it shows you how to create a dynamic menu system. Touching the stylus color button, for example, will open a new menu to select colors. This is a handy technique that you’ll need to know when developing your own user interfaces.
The Calibration utility lets you calibrate the resistive touchscreen. It achieves this by placing a number of crosses on the screen. You can calibrate the screen by using the stylus to touch the center of one of the crosses as accurately as you can.
After you touch one of the cross points the sketch runs through a calibration sequence, during which time you need to continue to touch the cross point. You’ll be informed when it is finished.
After calibration, the sketch will display a number of calibration values for the resistive touchscreen. These values can be used in your future sketches to make the touchscreen more accurate.
For the best accuracy, you should repeat the test several times using different cross points, noting the results each time. You can then average those results and use the values in your sketches.
The examples are a great way to demonstrate the capabilities of your touchscreen. But to really put your interface to work you’ll need to write your own interface code.
Writing a touchscreen interface can be challenging. I would suggest that you start by modifying one of the example codes, one that is closest to your desired interface.
For my experiment, I will be using an Arduino Mega 2560 to drive three LEDs. I used a Red, Green and Blue LED but really any colors will work – I just wanted my LED colors to match my button colors.
The digital I/O connector at the back of the Mega is still accessible even when the touchscreen display shield is installed, so I used three of those connections for the LEDs. I hooked up each LED anode through a 220-ohm dropping resistor and connected them as follows:
Of course you can use other pins, just remember to change the sketch to match. The pins I selected happen to all be PWM-capable, but in this simple interface I’m not dimming the LEDs.
The sketch is based upon the telephone keypad sketch. I modified it to eliminate the other functions and just display three buttons. Then I added code to toggle the LEDs.
TheAdafruit GFX Libraryis a comprehensive graphics library that can be used in a variety of display applications. It is a “core library”, meaning that it is called by other Adafruit libraries.
TheAdafruit TFTLCD Libraryis used. It uses the previous library to provide an easy method of drawing on the LCD display. It works with LCD displays that use driver chips like the ILI9325 and ILI9328.
TheTouchScreenlibrary comes in the code that you downloaded from the LCD Wiki or from the CD ROM included with your touchscreen shield. As its name implies it is used to interface with the touchscreen.
TheMCUFRIEND_kbvlibrary is also included in the software you obtained for your display shield. It takes care of supplying the correct hardware information for your display shield to the other libraries.
We also define some “human-readable” colors to use within our code, it’s a lot simpler and more intuitive than providing RGB values. I’ve includes all of the colors from the phone sketch I used as the basis for this code, so if you want to change button or background color you can easily do it.
Next, we define some touchscreen parameters. You can ‘fine-tune” your code here by using parameters from your own display, which you can obtain from the Calibration Sketch we ran from the sample code. Otherwise, just use the values here and you should be fine.
Now onto the button definitions. These are set up using arrays, which is a great technique to use for multiple buttons with similar dimensions and properties. If you want to change the button colors or text this is the place to make your changes.
In Setup, we initialize the serial monitor, which we can use to monitor the button press and release events. We also set up the three LED pins as outputs.
Next, we reset the display and try to identify it. This will run through a list of display chip drivers in the MCUFRIEND_kbv library and will attempt to select the correct one.
Now, still in the Setup, we set up the LCD display rotation and fill the background in black. Next step is to draw our buttons. Once we are done that the Setup is finished, and our screen should be displaying the three buttons on a black background.
The loop is where we will be monitoring the screen for keypresses. If we get one, and if its position corresponds to a button location, then we need to toggle the correct LED.
We start by triggering the touchscreen, which is done by toggling pin 13 on the Arduino high. If something is touching the screen we read it and assign it to a TSPoint object named “p”.
We then need to reset the pin modes for two of the touchscreen pins back to outputs. This is done as these pins get shared with other LCD display functions and get set as inputs temporarily.
Now we check to see if the pressure on the screen was within the minimum and maximum pressure thresholds we defined earlier. If it makes the grade then we determine where exactly the screen was pressed.
Now that we know where the screen was pressed we need to see if the pressure point corresponds to one of our buttons. So we cycle through the button array and check to see if the pressure point was within 10 pixels of our button location.
If we find a corresponding button we let it know it has been pressed, this lets the button respond visually to the keypress. We then look at the button ID number to see which LED we need to control. We reverse the value of the toggle boolean and then drive the LED appropriately – 1 for on, 0 for off.
Load the code into your Arduino IDE and upload it to your Arduino Mega 2560. Make sure you have the correct processor-type set in your Arduino IDE, especially if you are used to working with the Uno!
Testing the script is as simple as it gets – just press a button and observe the LEDs! You can also watch the serial monitor and note that each button press actually triggers two events – a press and release event.
This is a pretty simple demo but it does illustrate how to create a simple IDE. You can expand upon it to add more buttons, or to change the button colors or shapes. And, of course, you don’t have to light LEDs with your buttons, they can control anything that you can connect to your Arduino.
Touchscreen interfaces are used in a number of products, and now you can design your own devices using them. They can really make for an intuitive and advanced display and will give your project a very professional “look and feel” if done correctly.
This is not the only time we will look at touchscreen displays. Next time we’ll examine a capacitive touchscreen and we’ll explore the Adafruit Graphics libraries further to create some very fancy displays with controls and indicators.
Let"s learn how to use a touchscreen with the Arduino. We will examine the different types of touchscreens and will then create a simple interface using an inexpensive Arduino touchscreen shield.

Multiplex Machine is used to make Uniaxial, CBR and Marshall Tests. 50 kN capacity Multiplex Machine is equipped with a servo motor and BC100 TFT graphics data acquisition and control system. Suitable for CBR, Marshall, Triaxial and Uniaxial Tests and similar tests with appropriate accessories. The machine is also capable of doing load controlled tests. UTM-0108 Multiplex Machine is composed by a robust and compact two column frame with adjustable upper cross beam.
* Supplied complete with UTGM-1210 50 kN Load Cell, UTGM-0064 50 mm linear potentiometric transducer with holder (UTM-0114 and UTAS-1060) and lower compression platen.
.*** Choose the suitable cell for the specimen size (UTS-2400: 38-50 mm dia. samples / UTS-2401: 70-100 mm dia. samples). For cell and cell accessories see “Triaxial Cells, Cell Accesories and Sample Preparation” page.
BC100 TFT Graphic Display Data Acquisition and Control Unit is designed to control the machine and processing of data from load-cells, pressure transducers or displacement transducers which are fitted to the machine.
All the operations of BC100 are controlled from the front panel consisting of a 800x480 pixel 65535 color resistive touch screen display and function keys. 4 analogue channels (it would be simultaneous or not depending on the application at the factory) are provided for load-cells, pressure transducers or displacement transducers.
BC100 has easy to use menu options. It displays all menu option listings simultaneously, allowing the operator to access the required option in a seemless manner to activate the option or enter a numeric value to set the test parameters. The BC100 digital graphic display is able to draw real-time "Load vs. Time", "Load vs. Displacement" or "Stress vs. Time" graphics.
BC100 unit offers many addition unique features. You can save more than 10000 test results in its internal memory. BC100 unit has support for various off-the-shelf USB printers, supporting both inkjet and laser printers. Thanks to its built-in internet protocol suite, every aspect of BC100 device can be controlled remotely from anywhere around the world.
Calculates corrected CBR value at 2.5 and 5 mm the digital unit saves the load value at user defined displacement values such 0.625, 1.25, 1.875, 2.5, 3.75, 5, 7.5, 10, 12.5 mm
4 analog channels (it would be simultaneous or not depending on the application at the factory) for one analog channel for high capacity load cell, one analog channel for displacement transducer, one analog channel for low capacity load cell and one analog channel for pressure transducer for oil-water constant pressure unit
Programmable digital gain adjustment for load-cell, pressure transducers, strain-gauge based sensors, potentiometric sensors, voltage and current transmitters

In this Arduino touch screen tutorial we will learn how to use TFT LCD Touch Screen with Arduino. You can watch the following video or read the written tutorial below.
For this tutorial I composed three examples. The first example is distance measurement using ultrasonic sensor. The output from the sensor, or the distance is printed on the screen and using the touch screen we can select the units, either centimeters or inches.
The next example is controlling an RGB LED using these three RGB sliders. For example if we start to slide the blue slider, the LED will light up in blue and increase the light as we would go to the maximum value. So the sliders can move from 0 to 255 and with their combination we can set any color to the RGB LED, but just keep in mind that the LED cannot represent the colors that much accurate.
The third example is a game. Actually it’s a replica of the popular Flappy Bird game for smartphones. We can play the game using the push button or even using the touch screen itself.
As an example I am using a 3.2” TFT Touch Screen in a combination with a TFT LCD Arduino Mega Shield. We need a shield because the TFT Touch screen works at 3.3V and the Arduino Mega outputs are 5 V. For the first example I have the HC-SR04 ultrasonic sensor, then for the second example an RGB LED with three resistors and a push button for the game example. Also I had to make a custom made pin header like this, by soldering pin headers and bend on of them so I could insert them in between the Arduino Board and the TFT Shield.
Here’s the circuit schematic. We will use the GND pin, the digital pins from 8 to 13, as well as the pin number 14. As the 5V pins are already used by the TFT Screen I will use the pin number 13 as VCC, by setting it right away high in the setup section of code.
As the code is a bit longer and for better understanding I will post the source code of the program in sections with description for each section. And at the end of this article I will post the complete source code.
I will use the UTFT and URTouch libraries made by Henning Karlsen. Here I would like to say thanks to him for the incredible work he has done. The libraries enable really easy use of the TFT Screens, and they work with many different TFT screens sizes, shields and controllers. You can download these libraries from his website, RinkyDinkElectronics.com and also find a lot of demo examples and detailed documentation of how to use them.
After we include the libraries we need to create UTFT and URTouch objects. The parameters of these objects depends on the model of the TFT Screen and Shield and these details can be also found in the documentation of the libraries.
Next we need to define the fonts that are coming with the libraries and also define some variables needed for the program. In the setup section we need to initiate the screen and the touch, define the pin modes for the connected sensor, the led and the button, and initially call the drawHomeSreen() custom function, which will draw the home screen of the program.
So now I will explain how we can make the home screen of the program. With the setBackColor() function we need to set the background color of the text, black one in our case. Then we need to set the color to white, set the big font and using the print() function, we will print the string “Arduino TFT Tutorial” at the center of the screen and 10 pixels down the Y – Axis of the screen. Next we will set the color to red and draw the red line below the text. After that we need to set the color back to white, and print the two other strings, “by HowToMechatronics.com” using the small font and “Select Example” using the big font.
Next is the distance sensor button. First we need to set the color and then using the fillRoundRect() function we will draw the rounded rectangle. Then we will set the color back to white and using the drawRoundRect() function we will draw another rounded rectangle on top of the previous one, but this one will be without a fill so the overall appearance of the button looks like it has a frame. On top of the button we will print the text using the big font and the same background color as the fill of the button. The same procedure goes for the two other buttons.
Now we need to make the buttons functional so that when we press them they would send us to the appropriate example. In the setup section we set the character ‘0’ to the currentPage variable, which will indicate that we are at the home screen. So if that’s true, and if we press on the screen this if statement would become true and using these lines here we will get the X and Y coordinates where the screen has been pressed. If that’s the area that covers the first button we will call the drawDistanceSensor() custom function which will activate the distance sensor example. Also we will set the character ‘1’ to the variable currentPage which will indicate that we are at the first example. The drawFrame() custom function is used for highlighting the button when it’s pressed. The same procedure goes for the two other buttons.
drawDistanceSensor(); // It is called only once, because in the next iteration of the loop, this above if statement will be false so this funtion won"t be called. This function will draw the graphics of the first example.
getDistance(); // Gets distance from the sensor and this function is repeatedly called while we are at the first example in order to print the lasest results from the distance sensor
So the drawDistanceSensor() custom function needs to be called only once when the button is pressed in order to draw all the graphics of this example in similar way as we described for the home screen. However, the getDistance() custom function needs to be called repeatedly in order to print the latest results of the distance measured by the sensor.
Here’s that function which uses the ultrasonic sensor to calculate the distance and print the values with SevenSegNum font in green color, either in centimeters or inches. If you need more details how the ultrasonic sensor works you can check my particular tutorialfor that. Back in the loop section we can see what happens when we press the select unit buttons as well as the back button.
Ok next is the RGB LED Control example. If we press the second button, the drawLedControl() custom function will be called only once for drawing the graphic of that example and the setLedColor() custom function will be repeatedly called. In this function we use the touch screen to set the values of the 3 sliders from 0 to 255. With the if statements we confine the area of each slider and get the X value of the slider. So the values of the X coordinate of each slider are from 38 to 310 pixels and we need to map these values into values from 0 to 255 which will be used as a PWM signal for lighting up the LED. If you need more details how the RGB LED works you can check my particular tutorialfor that. The rest of the code in this custom function is for drawing the sliders. Back in the loop section we only have the back button which also turns off the LED when pressed.
In order the code to work and compile you will have to include an addition “.c” file in the same directory with the Arduino sketch. This file is for the third game example and it’s a bitmap of the bird. For more details how this part of the code work you can check my particular tutorial. Here you can download that file:
drawDistanceSensor(); // It is called only once, because in the



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey