
using a tft lcd to move a servo brands

The 5 Servo motors in this project are connected to one Arduino UNO board. Each Servo motor has a unique function. This article will shed light on the example in detail, along with the code, Arduino Simulation, and connection diagram.
This is a very good example to understand how multitasking is achieved in an easier way. This will help you to gain knowledge on both multitasking as well as tips and tricks to manage future tasks. Let us begin.
The analog value read from the potentiometer decides the rate at which we increment the angle. The higher the analog value, the faster will be the rate at which we reach the maximum angle and reset. hence, the potentiometer position decides the rate of movement of the Servo motor.
In the Arduino simulation link, you can experiment as well by playing with the potentiometer. Wokwi Arduino simulator supports several other peripherals as well which you can use in your next simulation projects.
The Third Servo motor is driven in a simple way. There is anotherpotentiometerconnected to Arduino PINA1. the angle of the servo motor is directly proportional to the position of the potentiometer.
For every interval (10 ms or 20 ms) the position of the servo motor is changed by one step. Depending on the button pressed, the servo 4 will either move to one edge or the other. Since this is an example, some cases are not taken care.
The article gave you an example project where 5 servo motors were controlled in parallel. This was possible due to following reasonsNodelay()functions are used. Adding a delay() function causes the control to block the processor by doing other tasks

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

[Since this was originally posted I’ve come up with a low-noise, low-profile side mounting method. The mounting method does not change the programming required to control one, or more, servos.]
The first thing I do is prepare the servo by setting the position of the shaft to 90 degrees, the midpoint of its 180 degree total travel. I do this by attaching the servo to an Arduino Unoand uploading this little sketch once to set the servo (for those who don’t know, “//” signifies the start of a comment ):
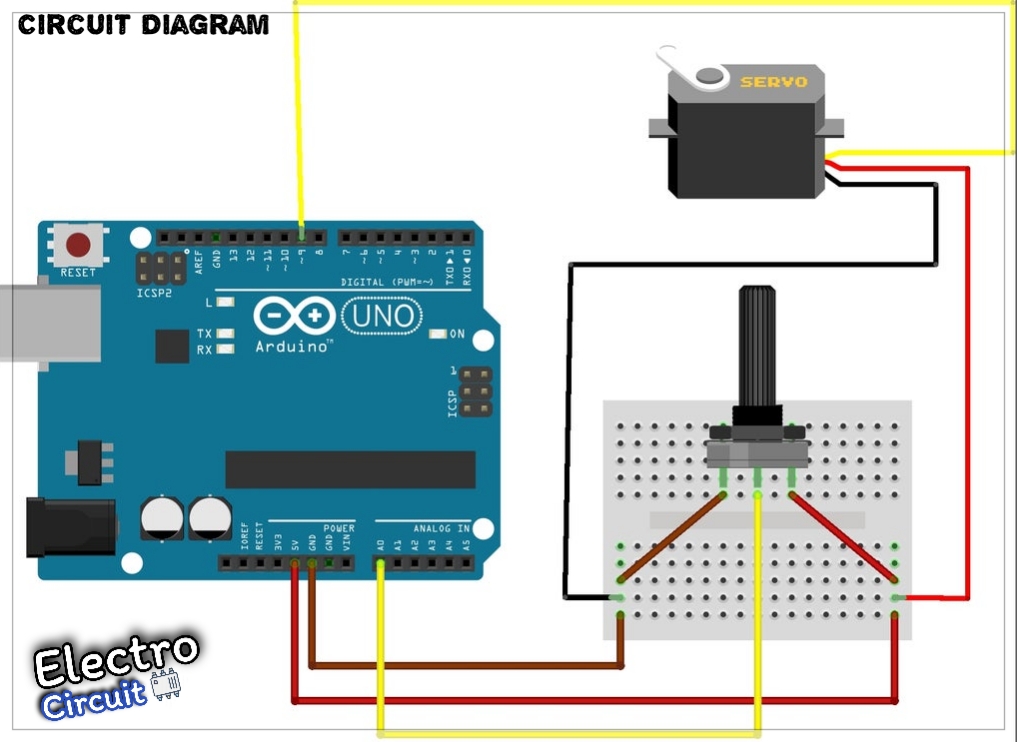
Here is the basic circuit for controlling a servo with an Arduino Uno, where the servo draws power from the Arduino. Servos can be independently powered, in which case only the signal wire and ground are connected to the Arduino.
The Arduino can Source a maximum of 200 mA current, and can Sink a maximum of 400 mA current. As you connect and try to run more devices, you’ll get to those limits quickly. In Model Railroad applications, given that we’re already routing track power, routing a few amps of +5 volt power to supply actuators like servos is a no-brainer for performance and system integrity. Whenever you use a separate power supply, the servo ground has to connect to both the power supply ground and the Arduino ground.
I fabricate a simple mounting bracket with a small plywood plate and a couple of blocks. Now I mount the servo in the bracket, place the horn onto the shaft in the position shown and then screw it down to the shaft.
Using a 1/16″ bit, I drill out a hole in the horn (usually the second hole from the end of the horn) and a hole in the turnout actuator bar. Don’t over ream the holes; the soft, slightly flexible plastic will provide a snug fit so you don’t have to use adhesives. Then, I slide a piece of 1/16″ brass rod through the horn to establish the location for a hole in the mounting plate.
I mark and drill the hole in the base plate. I rock the bit along the axis the rod will move (left to right in the view below) to slightly elongate it, and give it a more hour-glass profile. This hole functions as a fulcrum for the rod.
I mount the servo below the turnout. For this demonstration, I used hot glue to mount the bracket to the underside of the demonstration layout segment; screws are a better idea for most situations, allowing you to build in some adjustability. With the turnout set in the straight-through position, I carefully thread the rod through the turnout actuator bar, down through a prepared hole in the layout to the hole in the mounting plate and then the servo horn. The brass rod is perpendicular to the horn at the 90 degree setting. Moving the servo horn tilts the rod, moving the turnout above to its divergent position.
At this point I test the servo and make any adjustments necessary for smooth operation. When I’m satisfied everything is right, I trim the rod to its final size.
I’m planning to try music wire instead brass rod in the near future. The problem with brass rod is that it is stiff, and the servo can get fussy at the end of movement ranges because there is no give. Music wire is like spring wire and should allow me to apply pressure at the ends of movement ranges without overtaxing the servo. I’ll update this page with the results of those tests.
The button takes power from the +5v board supply and, when the button is pushed, routes the power to a designated pin, putting the pin in a HIGH state. On the output side of the button a pull-down resistor routes stray power to ground to guarantee that the pin is in a LOW state whenever the button is not pushed.
Here is a simple sketch to control a servo and have it move over about 2 seconds every time a button is pressed. The straight position is always 90 degrees because of the way I install the servo. The divergent angle depends on how the servo was installed in relation to the turnout– it will either be a larger angle in the 110 – 120 degree range, or a smaller angle in the 60-70 degree range. With practice and consistent placement of servos, they can all be the same; but if not, storing unique settings for each servo is not difficult.
Finally, we can add one more refinement and have the Arduino feedback position status via two pins that we can use to power leds at the control panel. The circuit looks like this:
To control multiple servos with one Arduino, your sketch would need variables for each servo to hold its pin id and unique divergent angle. More advanced programmers will want to create something like an array of data structures to organize pertinent data about the servos.
NOTE: The delay() function is used a lot in small demonstration sketches to control timing. The problem with delay is that it throws the board into a do-nothing state that prevents anything else from happening. In more complex sketches it is often advisable to avoid delay() and use other methods to meter actions across multiple controller cycles. In this case, be aware that the board is tied up while the servo is in motion.
This awesome little display breakout is a great way to add a small, colorful and bright display to any project. Since the display uses 4-wire SPI to communicate and has its own pixel-addressable frame buffer, it can be used with every kind of microcontroller. Even a very small one with low memory and few pins available!
This 2.2″ display has 320×240 color pixels and is a true TFT display. The TFT driver (ILI9340 or compatible) can display full 18-bit color (262,144 shades). The breakout has the TFT display soldered on (it uses a delicate flex-circuit connector) as well as a ultra-low-dropout 3.3V regulator and a 3/5V level shifter so you can use it with 3.3V or 5V power and logic. Adafruit also had a little extra space on the back so there is a microSD card holder for easily loading full-color bitmaps from a FAT16/FAT32 formatted microSD card.
The Adafruit 2.2″ TFT LCD with MicroSD Card also features an EYESPI connector for a simpler connection to the LCD. EYESPI is a single 18-pin FPC used as a quick way to connect displays.

The PowerBox Royal SR2 once again sets new technical standards, offering a convincing array of features which until now have been the exclusive preserve of professional aviation. P² servo bus, 26 channels, 12-axis gyro, two pairs of regulators and a full-color screen - these are just a few of the technical refinements which the PowerBox Royal SR2 offers the ambitious pilot.
The PowerBox Royal SR2 is housed in a high-quality, extremely compact case with integral aluminum heat-sink. The large cooling area dissipates the heat generated by the four regulators, which are wired in pairs to provide energy for all 26 servos. Both regulator pairs can be set to any of four different voltages. This makes it possible to combine standard 6V servos with high-performance HV types, without additional regulator modules.
For the first time all the data relating to all the model’s servos can be monitored, and their parameters adjusted¹ from the transmitter. This development has been made possible by the introduction of our P²-BUS protocol, whose aim was to maintain complete control of all the components in the model. The PowerBox Royal SR2 has four fully independent P²-BUS interfaces, which can be set to two different voltage levels.
These interfaces can be used to connect servos with an integral P²-BUS, or conventional servos with the new P²-ServoBridge. The P²-ServoBridge is an adapter which converts the P²-BUS into a PWM signal for normal servos; it also has an integral infinitely variable electronic fuse.
This has allowed us to implement a bus system in the model which is significantly superior to standard PWM wiring in respect of security and performance.
All data relating to the receivers and power supply system are displayed on the full-color screen, and all settings are available in a carefully structured, bi-lingual menu which is easily understood.
Connecting the optional iGyro SAT converts the PowerBox Royal SR2 into a 12-axis gyro which has few equals in terms of functionality. The gyro can be set up to suit even the most complicated of models in just a few minutes. After this, the correct gyro gain is set from the transmitter in a test-flight using a rotary control. A whole series of supplementary Expert settings is available to allow the pilot to fine-tune the gyro effect to suit his unique individual preferences.
Naturally a GPS III sensor can also be connected to the PowerBox Royal SR2. This unit provides automatic gyro gain adjustment in relation to airspeed.

In this tutorial we will learn how servo motors work and how to control servo motors with Arduino. Servo motors are very popular and widely used in many Arduino projects because they are easy to use and provide great position control.
Servos are great choice for robotics projects, automation, RC models and so on. I have already used them in many of my Arduino projects and you can check out some of them here:
You can watch the following video or read the written tutorial below. It includes several examples how to use a servo motor with Arduino, wiring diagram and codes. In additional, it has a guide how to control multiple servo motors with Arduino using the PCA9685 PWM driver.
A servo motor is a closed-loop system that uses position feedback to control its motion and final position. There are many types of servo motors and their main feature is the ability to precisely control the position of their shaft.
In industrial type servo motors the position feedback sensor is usually a high precision encoder, while in the smaller RC or hobby servos the position sensor is usually a simple potentiometer. The actual position captured by these devices is fed back to the error detector where it is compared to the target position. Then according to the error the controller corrects the actual position of the motor to match with the target position.
Hobby servos are small in size actuators used for controlling RC toys cars, boats, airplanes etc. They are also used by engineering students for prototyping in robotics, creating robotic arms, biologically inspired robots, humanoid robots and so on.
There are four main components inside of a hobby servo, a DC motor, a gearbox, a potentiometer and a control circuit. The DC motor is high speed and low torque but the gearbox reduces the speed to around 60 RPM and at the same time increases the torque.
The potentiometer is attached on the final gear or the output shaft, so as the motor rotates the potentiometer rotates as well, thus producing a voltage that is related to the absolute angle of the output shaft. In the control circuit, this potentiometer voltage is compared to the voltage coming from the signal line. If needed, the controller activates an integrated H-Bridge which enables the motor to rotate in either direction until the two signals reach a difference of zero.
A servo motor is controlled by sending a series of pulses through the signal line. The frequency of the control signal should be 50Hz or a pulse should occur every 20ms. The width of pulse determines angular position of the servo and these type of servos can usually rotate 180 degrees (they have a physical limits of travel).
Generally pulses with 1ms duration correspond to 0 degrees position, 1.5ms duration to 90 degrees and 2ms to 180 degrees. Though the minimum and maximum duration of the pulses can sometimes vary with different brands and they can be 0.5ms for 0 degrees and 2.5ms for 180 degrees position.
There are many different models and manufacturers of RC or hobby. The main consideration when choosing a servo motor is its torque, operating voltage, current draw and size.
Let’s put the above said to test and make a practical example of controlling a hobby servo using Arduino. I will use the MG996R which is a high-torque servo featuring metal gearing with stall torque of 10 kg-cm. The high torque comes at a price and that’s the stall current of the servo which is 2.5A. The running current is from 500mA to 900mA and the operating voltage is from 4.8 to 7.2V.
We simply need to connect the control pin of the servo to any digital pin of the Arduino board, connect the Ground and the positive wires to the external 5V power supply, and also connect the Arduino ground to the servo ground.
The S90 Micro Servo has lower current consumption, around 100-200mA no-load running current, but around 500-700mA stall current. On the other hand, the Arduino 5V pin can output only around 500mA if powered via USB, or up to 1A in powered via the barrel connector.
Even though it’s possible to run these 9g servo motors directly to Arduino, for more stable work I would suggest to always use an external power supply for them.
Now let’s take a look at the Arduino code for controlling the servo motor. The code is very simple. We just need to define the pin to which the servo is connect, define that pin as an output, and in the loop section generate pulses with the specific duration and frequency as we explained earlier.
After some testing I came up with the following values for the duration of the pulses that work with my servo. Pulses with 0.6ms duration corresponded to 0 degrees position, 1.45ms to 90 degrees and 2.3ms to 180 degrees.
I connected a multimeter in series with the servo to check the current draw. The maximum current draw that I noticed was up to 0.63A at stall. Well that’s because this isn’t the original TowerPro MG996R servo, but a cheaper replica, which obviously has worse performance.
Here we just need to include the library, define the servo object, and using the attach() function define the pin to which the servo is connected as well as define the minimum and maximum values of the pulses durations. Then using the write() function we simply set the position of the servo from 0 to 180 degrees.
The Arduino servo library supports controlling of up to 12 servos at the same time with most the Arduino boards, and 48 servos using the Arduino Mega board. On top of that, controlling multiple servo motors with Arduino is as easy as controlling just a single one.
So, we just have to create objects from the Servo class for each servo motor, and define to which Arduino pin is connected. Of course, we can set any servo to move to any position, at any time.
There’s also another way of controlling servos with Arduino, and that’s using the PCA9685 servo driver. This is a 16-Channel 12-bit PWM and servo driver which communicates with Arduino using the I2C bus. It has a built in clock so it can drive 16 servos free running, or independently of Arduino.
What’s even cooler we can daisy-chain up to 62 of these drivers on a single I2C bus. So theoretically we can control up to 992 servos using only the two I2C pins from the Arduino board. The 6 address select pins are used for setting different I2C addressed for each additional driver. We just need to connect the solder pads according to this table.
So first we need to include the libraries and define the PCA9685 object. Then using the Servo_Evaluator instance define the pulses duration or the PWM output of the driver. Note that the outputs are 12-bit, or that’s a resolution of 4096 steps. So the minimum pulse duration of 0.5ms or 0 degrees position would correspond to 102 steps, and the maximum pulse duration of 2.5ms or 180 degrees position to 512 steps. But as explained earlier these values should be adjusted according your servo motor. I had value from 102 to 470 which corresponded to 0 to 180 degrees position.
I connected a second servo to the driver, and as I expected, it wasn’t positioning the same as the first one, and that’s because the servos that I’m using are cheap copies and they are not so reliable. However, this isn’t a big problem because using the Servo_Evaluator instance we can set different output settings for each servo. We can also adjust the 90 degrees position in case it’s not precisely in the middle. In that way all servos will work the same and position at the exact angle.
So we should create separate PCA9685 object for each driver, define the addresses for each driver as well as set the frequency to 50Hz. Now simply using the setChannelPWM() and pwmForAngle() functions we can set any servo at any driver to position any angle we want.
This is a common problem with these hobby servo motors, the SG90 Micro Servo and the MG996R. The reason for this is that, as mentioned earlier, they can draw quite significant amount of current when they are at load. This can cause the Arduino board to reset, especially if you are powering the servo directly from the Arduino 5V pin.
In order to solve this issue you can use a capacitor across the GND and the 5V pin. It will act as a decouple capacitor which will provide additional current to the system at start up when the DC motor starts.
This is another common problem with these hobby servos. As we explained earlier, a pulse width of 1ms (0.5ms) corresponds to 0 degrees position, and 2ms (2.5ms) to 180 degrees. However, these values can vary from servo to servo and between different manufacturers.
In order to solve this problem, we need to adjust the pulse width we are sending to the servo motor with the Arduino. Luckily, using the Arduino Servo library we can easily adjust the pulse widths values in the attach() function.
The attach() function can take two additional parameters, and that’s the minimum and maximum pulse width in microseconds. The default values are 544 microseconds (0.544milliseconds) for minimum (0 degrees) angle, and 2400 microseconds (2.4ms). So by adjusting these values we can fine tune the moment range of the servo.
I made 3D models of the two most popular servo motors, the SG90 Micro Servo and the MG996R servo motor. You can download load them from the links below.
So, we have covered almost everything we need to know about using servo motors with Arduino. Of course, there are some many manufacturers and models of these type of hobby or RC servo motors, and each of them has its own unique features that might differ from what we explained above.
The possibilities for creating awesome robotics, automation and RC projects using motors are endless, however choosing the right model for your application is very important.
I hope you enjoyed this tutorial and learned something new. Feel free to ask any question in the comments section below, as well as make sure you can my Arduino Projects Collection.
Using a servo motor with Arduino is quite easy. The servo motor has just 3 wires, two of which are GND and 5V for powering, and the third wire is the control line which goes to the Arduino board.
We can run servo motors directly from Arduino, but we might have power problems. If the servo motor draws more than 500mA of current, the Arduino board might lose it’s power and reset. It’s better to always use a separate power source for the servo motors.
Using the Arduino Servo library we can control up to 12 servo motors with most Arduino boards, and up to 48 servo motors with the Arduino Mega board. Of course, we need to use a dedicated power source for the servo motors.

A multi-axis controller integrated with touchscreen interface, believed to be the most simplest one currently in the market. It comes with QuickSet intuitive software too. All you need to do is plug it, ...
... industrial PC and the 15″ touch screen. Design and ergonomics satisfy the highest demands. The hardware and software are state-of-the-art technology. The new CNC-S control and the new, revolutionary CNC-S ...
With DirectIndustry you can: Find the product, subcontractor or service provider you need | Find a nearby distributor or reseller| Contact the manufacturer to get a quote or a price | Examine product characteristics and technical specifications for major brands | View PDF catalogues and other online documentation

3 CANmotion modes (Profile Position Mode, Interpolation Position Mode, Homing Mode) are provided for CANopen DS402 standard. Max. length of the communication cable can reach up to 40m (when using standard communication cable).
Built-in DC 24V power supply is provided to simplify the wiring and save space.Features of ASDA-A2-E :Touch probe function can be enabled with two dedicated Digital Inputs (DI) on CN7 or the external encoder.
Integrated Safe Torque Off (STO) safety function according to the standards of EN 61800-5-2; IEC 61508, SIL2; IEC 62061, SIL2; ISO 13849-1, Cat.3 ,PL=d

This project shows how to use the STONE display, STM32 microcontroller, ultrasonic sensors, and a servo. The purpose of the project is to be able to display the distance measured by ultrasound in real-time through the STONE display.
STONE provides TOOLBOX software for engineers to easily and visually set up various functions on the GUI, such as text, numbers, curves, image switching, keyboard, progress bar, slider, dial, clock, and touch buttons, data storage, USB download, video & audio.
Engineers can easily adopt the TFT-LCD color user interface and touch functions on various industrial devices and also reduce a lot of development time and cost.
Application areas: medical and beauty equipment, engineering machinery and vehicle equipment, electronic instruments, industrial control systems, electric power industry, civil electronic equipment, automation equipment, transportation equipment, etc.
Through the existing command set provided by the product, this TFT-LCD module can generate command transmission and recognition with the main controller. The main controller receives the commands from the TFT-LCD module to operate the industrial equipment.
The human ear can hear the frequency of sound waves for 20HZ ~ 20KHz. when the vibration frequency of sound waves is greater than 20KHz or less than 20Hz, we can not hear the sound waves. Therefore, we put the frequency higher than 20KHz sound waves called “ultrasonic”. Because of its good directionality, strong penetrating ability, ease to get more concentrated sound energy, in the water to spread far, can be used for measuring distance, measuring speed, cleaning, welding, stone crushing, sterilization, etc. There are many applications in medicine, the military, industry, and agriculture. Such as ultrasonic cleaning machine, ultrasonic humidifier, medical examination B ultrasound, color ultrasound, ultrasonic flaw detector, etc. Sound is generated by vibration, the device that can produce ultrasonic waves is the ultrasonic transducer, customarily called ultrasonic transducer, or ultrasonic probe. The ultrasonic probe is mainly composed of a piezoelectric chip, which can both emit and receive ultrasonic waves. There can be many different materials that make up the chip. The size of the chip, such as the diameter and thickness also varies, so the performance of each probe is different, and its performance must be understood in advance before using it.
Commonly used is the piezoelectric ultrasonic generator, which works by using the resonance of a piezoelectric crystal. Inside the ultrasonic sensor, probes are two piezoelectric chips and a resonant plate. When its two poles applied a pulse signal, its frequency is equal to the inherent oscillation frequency of the piezoelectric chip, the piezoelectric chip will resonate, and drive the resonance plate vibration, it will produce ultrasonic waves. Conversely, if the voltage is not applied between the two electrodes when the resonance plate receives ultrasonic waves, the piezoelectric chip will vibrate, converting mechanical energy into electrical signals, and then it becomes an ultrasonic receiver. Ultrasonic sensor uses the principle of the piezoelectric effect to convert electrical energy and ultrasound into each other, that is, in the emission of ultrasound, the electrical energy will be converted into ultrasound emission; and in the reception, the ultrasonic vibration will be converted into an electrical signal.
The most commonly used method of ultrasonic distance measurement is the echo detection method, as follows, the ultrasonic transmitter launches ultrasound to a certain direction, at the moment of launch while the counter began timing, ultrasound propagation in the air, the way to encounter the obstacle surface blocking immediately reflected back, the ultrasonic receiver received back the reflected ultrasound immediately stop timing. Ultrasonic waves in the air propagation speed of 340m/s, according to the time recorded by the timer t, you can calculate the launch point from the obstacle surface distance s, that is: s = 340t/2
Ultrasonic emission circuit: by the 555 timers to generate 40KHZ pulse signal, added to the pins of the ultrasonic probe so that the internal resonance of the piezoelectric chip can be generated to emit ultrasonic waves outward.
Ultrasonic receiving circuit: As the electrical signal generated by the ultrasonic receiving probe is very weak, it needs to be amplified and processed. In the figure below, the transistor and operational amplifier LM324 constitute the amplifier circuit, which amplifies the received signal and then drives the relay. Generally, use an integrated signal amplifier chip to amplify the signal. CX20106 is a special integrated preamplifier from SONY, which consists of a preamplifier, limiting amplifier, band-pass filter, detector, integrator, and rectifier circuit. One of the preamplifiers has an automatic gain control function, which can ensure that when the ultrasonic sensor receives weak voltage which outputs from the reflected signal in the long-distance, the amplifier has a high gain when the input signal is strong in the near distance, the amplifier will not be overloaded.
The ultrasonic wave is also a kind of sound wave, its sound speed V is related to the temperature. When used, if the temperature of the propagation medium does not change much, the ultrasonic velocity can be approximated as being essentially constant during the propagation process. If the distance measurement accuracy requirements are very high, the measurement results should be numerically corrected by the method of temperature compensation. v = 331.4 + 0.607T, where T is the actual temperature in ℃, v is the speed of ultrasound propagation in the medium in m/s, the actual measurement will generate several special cases, and lead to wrong measurement results due to the different angles of the sensor and the measured object, and the surface of the measured object may not be flat, as follows, it can be solved by rotating the probe angle several times to measure.
Operating frequency. Operating frequency is the resonant frequency of the piezoelectric chip. When the frequency of the AC voltage is added to both ends of it and the resonant frequency of the chip is equal, the output energy is the largest and the sensitivity is the highest.
Operating temperature. Because the Curie point of piezoelectric materials is generally high, especially with ultrasonic probe diagnosis, using less power, so the operating temperature is relatively low, it can work for a long time without failure. The temperature of medical ultrasound probes is relatively high and requires separate cooling equipment.
HC-SR04 ultrasonic distance measurement module can provide a 2cm-400cm non-contact distance sensing function, the accuracy of distance measurement up to 3mm; the module includes an ultrasonic transmitter, receiver, and a control circuit.
There is a signal return, output a high level through the IO port ECHO, the high-level duration is the time from emission to return of ultrasonic wave.
Servo (called Servo in English): It is a set of automatic control systems consisting of a DC motor, reduction gear set, sensor, and control circuit. By sending a signal, the output axis rotation angle is specified. Servo generally has a maximum rotation angle (such as 180 degrees.) The difference with ordinary DC motors is mainly in that DC motors rotate in a circle, and servos can only rotate within a certain angle, not in a circle (digital servos can switch between servo mode and motor mode without this problem). THE ordinary DC motor can not feedback the rotation angle information, while the servo can do it. The applications are also different, as ordinary DC motors are generally used for powering the whole rotation, while servos are used to control the rotation of an object at a certain angle (such as the joints of a robot).
The one on the far right is a common standard servo, the two small ones in the middle are micro servos, and the lanky one on the left is a large-torque servo. These servos are all controlled by three wires. The following servos are commonly used for making robots, and each of them is fixed in a different way. If you change from one model to another, the whole mechanical structure needs to be redesigned. The first one is MG995, which has the advantages of cheap price, metal gears, and good durability. The disadvantage is that the torque is relatively small, so the load can not be too large, if you do bipedal robots and the like, this servo is not very suitable, because the legs are too much force. Doing ordinary six-legged, or robotic is still good.
The second is SR 403, this servo is found by the net friend xqi2 because using the MG995 to do bipedal robot is shaking too much. After testing, the SR 403 makes a good bipedal robot, and at least not shaking. The advantage is the torque is large, all-metal gears, the price is also quite cheap, the disadvantage is that the workmanship is very cottage. Another disadvantage is waiting for feedback.
The third is the legendary digital servo AX12+, which is a special servo for the tried and tested robot. In addition to the high price, the use of RS485 serial communication (the control board will have to change the digital servo dedicated control board), the other is all advantages.
The following diagram is an exploded view of a common analog servo, whose components are mainly gear sets, motors, potentiometers, motor control boards, and housings.
A motor control board is mainly used to drive the motor and receive information back from the potentiometer. The motor is the source of power, this does not need too much explanation. The role of the potentiometer here is mainly to send the signal back to the motor control board through the change of resistance which is generated by its rotation so that it can judge whether the output axis angle is output correctly. The role of the gear set is mainly to amplify the force so that the small power motor can generate large torque.
After being amplified by the first stage gear, it then passes through the second, third, and fourth stage amplifying gears before finally being output through the output axis.
Through the above two pictures can be clearly seen, this servo is a 4-stage gear amplification mechanism, a small power is amplified layer by layer so that a small motor can have 15KG of torque.
The servo system of the servo is controlled by variable width pulses, and the control line is used to transmit the pulses. The parameters of the pulse are minimum, maximum, and frequency. Generally, the reference signal of the servo is 20ms in period and 1.5ms in width. And the position defined by this reference signal is the middle position. The servo has a maximum rotation angle, and the middle position is defined as the exact same amount from this position to the maximum angle as the minimum angle. The most important point is that the maximum rotation angle may not be the same for different servos, but the width of the pulse at its middle position is certain, which is 1.5ms. As follows:
The angle is generated by a continuous pulse from the control line. This method of control is called pulse modulation. The length of the pulse determines how far the servo will turn. For example, a 1.5-millisecond pulse will go to the middle position of rotation (for a 180° servo, it is the 90° position). When the control system sends a command to let the rudder move to a certain position and let it keep this angle, this time the influence of external forces will not let its angle change, but this has the upper limit, the upper limit is its maximum torque. Unless the control system keeps sending out pulses to stabilize the angle of the servo, the angle of the servo will not remain unchanged.
When the servo receives a pulse that is less than 1.5ms, the output axis will counterclockwise rotate a certain angle with the middle position as the standard. The opposite case is received pulses greater than 1.5ms. Different brands, or even different servos of the same brand, will have different maximum and minimum values. Generally, the minimum pulse is 1ms and the maximum pulse is 2ms. As follows:
First of all, the servo leads, generally for three-wire control (No contact with a servo that is not a three-wire control), red for power, brown for ground, yellow for the signal. When controlling the servo, you need to constantly give PWM waves so that the servo has torque at a certain angle.
Precise carving machine, precise lathe/milling machine, double column type machining center, TFT LCD cutting machine, robot arm, IC packaging machine, high-speed packaging machine, CNC processing equipment, injection processing equipment, label inserting machine, food packaging machine, printing.
ECMA-C10807RH ECMA-C10807RS ECMA-C10807SH ECMA-C10807SH ECMA-C10807SS ECMA-C80807RS ECMA-CA0807RS ECMA-CA0807RS ECMA-CA0807SS ECMA-CA0807SS ECMA-CA0907SS ECMA-G11306RS ECMA-G11306SS

In this article, we will see a list of useful Arduino Shields, a special hardware that sits on top of Arduino and gives additional features to Arduino. I collected a list of unique and useful Arduino Shields which are mostly compatible with Arduino UNO.
Arduino Shields are add-on boards than can be plugged on top of an Arduino board and provided additional capabilities and functionalities to an Arduino Board. They have the same pin position as an Arduino Board and are usually designed to implement a specific function.
While it is easy to play around with Arduino by placing components on a breadboard, it is not a preferrable option to design a final product with breadboards.
With the help of Arduino Shields, Sensor Boards and other expansion boards, you can significantly reduce the complexity of the wiring the circuit and at the same time reduce the build time and construction process.
NOTE: The images shown here are just for reference. Actual product may vary. Also, there are several manufacturers of a single shield. So, features may vary between shields from different manufacturers.
Perhaps the simplest of Arduino Shields is the Prototype Shield. It comes with a prototyping area, on which, you can solder the components, if necessary.
If you do not want to solder, then don’t worry. The shield also comes with a 170 Pin Mini breadboard, which can be attached on the prototyping area with the help of double-sided tape.
As the name suggests, an IO Expansion Shield allows you to connect several Analog and Digital IO devices to the Arduino without breadboard and soldering. There are headers for connecting 3-pin and 4-pin sensors. You can select the supply voltage for sensors between 3.3V and 5V.
Additionally, there is a dedicated Xbee connector with EASYLINK and RESET buttons. There are also connectors for both I2C (I2C) and SPI. All the pin headers are neatly colour coded for easy identification.
If you are beginner, then the Multifunction Shield is a must have expansion board for Arduino if you want to quickly start programming without worrying about wiring the circuits. It contains 4 LEDs, 3 Push Buttons, a 10 kΩ Potentiometer, a Piezo Buzzer as the basic IO devices.
Also, there is an on-board 4 – digit 7 – Segment Display connected through two 74HC595 ICs to drive them through serial communication. There are also interfaces for LM35 Temperature Sensor, DS18B20 Temperature Sensor and IR Receiver.
One of the popular Arduino Shields is the LCD Shield. It is built around the famous 1602 Character LCD (16×2 LCD Module). It contains a 16×2 LCD Display with White characters and Blue backlight. The shield also contains 6 Push Buttons of which 1 is the Reset button and the other 5 are for user application like LEFT, RIGHT, UP, DOWN and SELECT.
The LCD is connected to Arduino through pins D4 – D10 using 4-bit mode. You can also control the backlight (D10). Another beautiful implementation is the way the 5 push buttons are connected using only one Analog IN pin.
If you want to build robots and cars using Arduino, then a Motor Driver is an important component. Fortunately, there are several Motor Driver Shields for Arduino to reduce design time and complexity. The most popular one is the L293D Motor Shield. As the name suggests, it contains the famous L293D Motor Driver IC.
The expansion board consists of two L293D ICs and a 74HC595 Shift Register IC. Using this shield, you can connect 4 DC Motors (up to 12V) and two Servo Motors (5V) at the same time. To power the motors, there is a connector for providing external power supply.
Controlling Robots and RC Cars with a Joystick is a fun little project on its own. A Joystick Module is a tricky one as it is not breadboard friendly. So, using a Joystick Shield on top of your Arduino Board changes the “game” completely (pun intended). There are several types of Joystick Shields but the one I present here is a complete package.
If you want control mains powered devices using Arduino, then you use a Relay Module in your project. A Relay Shield is an Arduino Expansion Board consisting of 4 Mechanical Relay Modules with four dedicated terminal connectors for each relay.
A 4×4 Keypad Matrix consists of 16 Push Buttons arranges in a matrix of 4 Rows and 4 Columns. Each button can be mapped to a character or a value. To simplify the interface, you can use the 4×4 Keypad Shield.
To incorporate Touchpad in your Arduino Project, you can use the Capacitive Touch Pad Shield. It consists of 9 Capacitive Touch Pads interface through MPR121 IC, Proximity Capacitive Touch Sensor Controller.
If you are building a Robotic Arm or a Hexapod Robot with lot of Servo Motors, then the next Arduino Shield is just for you. It is a 16-Channel, 12-bit PWM Servo Shield for Arduino.
This Shield is based on PCA9685, an I2C based PWM LED Controller. So, in addition to controlling the Servos, you can also drive LEDs with PWM Signals.
Using a GSM/GPRS Shield, you can connect your Arduino Board to a GSM Network. The GSM/GPRS Shield allows you to make / answer calls, send / receive messages (SMS), connect to internet through GPRS.
Some of the common applications of GSM/GPRS Shield are Home Automation, Industrial Automation, Agriculture / Irrigation Automation, Vehicle Tracking, Remote Monitoring and Control.
HC-05 Bluetooth Module is a very popular communication modules for Arduino. There are Arduino Shields with Bluetooth Modules on then to enable Bluetooth Communication over serial interface.
Another popular shield in the Arduino Community is the Ethernet Shield. This particular Ethernet Shield is based on W5100 Ethernet Controller from Wiznet. Connect an ethernet cable to the RJ-45 Jack and you can control Arduino from the Internet.
Connection speeds up to 100 Mbps are possible. There is also an on-board microSD Card slot so that you can implement any real time data logging applications or weather stations.
The impact of ESP8266 on DIY Community is immeasurable. It is a small module with built-in Wi-Fi for wireless connectivity of Arduino. The combination of Arduino and ESP8266 is a major contributor to the DIY IoT Projects. There are Wi-Fi shields for Arduino to easily integrate ESP2666 (or any other Wi-Fi Controller) to an Arduino Board.
No need for soldering or breadboard as this Wi-Fi Shield simply plugs into an existing Arduino Board and communicated over Serial Interface. There is also a microSD Card slot on-board for data storage.
The VS1053 MP3 Decoder based MP3 Shields for are Arduino are a great way to add Music touch to your DIY Project. The VS1053 MP3 Decoder IC is an decode several audio formats like Ogg Vorbis, MP3, AAC, WMA, MIDI.
VS1053 MP3 Player Shield also consists of an microSD Card Slot so that it is easy to store and play audio from an SD Card. There is a 3.5mm headphone jack and the shield communicates with Arduino over SPI Interface.
This is a fun little shield to a small colour display to Arduino. The Colour TFT Shield consists of a 1.8” TFT LCD screen with a resolution of 160×128 pixels. This particular display is controlled by ST7735 TFT Driver IC which can display 18-bit colours.
A Touchscreen Module is a great addition to your Arduino Project. A TFT Touchscreen LCD Shield is the easy way to start with touch screen. Although touch screen modules come in various dimensions, a 2.4” LCD is quite popular.
This LCD supports a resolution of 320×240 pixels. There are many LCD Controllers but SPFD5408 is a popular one. The shield also contains a microSD card slot.
Adding a microSD Card to your Arduino Project can be very useful in data logging and other similar applications. A microSD Shield enable you to add a microSD card to your Arduino Board.
Often used in automobiles, CAN bus is an industrial bus used for long distance, low speed data transfer. CAN-Bus Shield is designed around MCP2515 CAN Bus Controller with SPI Interface.
Every CAN Controller requires a CAN Transceiver to convert the single ended data lines to differential data lines. This particular CAN-Bus Shield uses MCP2551 CAN Transceiver IC.
The Xbee Shield for Arduino is a great way simplify the process of adding Xbee Modules to your Arduino Project. These shields are designed to support different wireless networks like Zigbee, Bluetooth Low Energy, IEEE 802.15.4, etc.
A GPS Shield with Data Logger consists of a GPS Receiver Module and a microSD Card Slot on-board. The GPS Module interfaces with Arduino over serial communication while the microSD card is connected to the SPI Pins.
You can implement speed monitoring, position tracking and other similar application using a GPS Logger Shield and an Arduino UNO board. There are several GPS Modules like GP3906, Neo-6M, REB-4216 etc.
PN532 NFC Controller based NFC/RFID Shield is a perfect board for adding 13.56 MHz RFID or NFC functionality to your Arduino applications. The shield is compatible with SPI, I2C and SPI Communication interfaces.
It comes with an on-board antenna and also an external antenna (any antenna can be selected with the help of jumpers). Also, the communication interface can be selected with another set of jumpers.
As the name suggests, an USB Host Shield gives your Arduino board USB Host capabilities. This USB host shield consists of all the digital and analog circuitry to enable full-speed USB peripheral/host with your Arduino UNO.
The MQ2 Gas Sensor is a very useful module to implement safety related applications. An MQ2 Smoke Sensor Shield will be perfect for your Arduino Board to detect Smoke, LPG, Carbon Monoxide and other toxic gases.
Digital FM Radio Shield for Arduino enable you to listen to FM stations using your Arduino Board. You can digitally control the stations, receive Radio data system (RDS) information like artist song and read the strength of the signal using this shield.
The on-board DSP Signal Conditioning system provides you with a clear audio over the headphones. There are also buttons to change volume and stations.
If we want a long distance, no interference and reliable communication, especially in noisy industrial environment, then RS484 is the best choice. A fully isolated RS485 Shield for Arduino can be used for professional application as it provides galvanic isolation between the RS485 Bus and the Arduino.
This Shield is based on ISO3080, a fully isolated RS485 Transceiver. There is support for full duplex RS-422 (4-wires) or half-duplex RS-485 (2-wire) data transfer.
Addressable LEDs are awesome. Whether it is an Arduino project or a new PC build, adding LEDs with customisable colours is always a delight. NeoPixel, a brand of Addressable LEDs (based on WS2812B) from Adafruit, are very popular RGB LEDs in the market.
It contains 40 RGB LEDs arranged in a 5×8 matrix. You can daisy chain these shields but remember that these addressable LEDs are RAM hungry and an UNO board may run on low RAM.
Even though it is considered an antique protocol, the MIDI Communication Protocol allows you to control music synthesizers, sequencers, samplers and other music related devices. Using a MIDI Shield you can build Arduino based MIDI Interface System.
The shield consists of MIDI IN and MIDI OUT ports. There are two potentiometers that can be configured to control volume, pitch, tone etc. The shield also has three push buttons for additional functionality.
If you want to add power backup to your Arduino Project, then Energy Shield is the way to go. This shield is based on LiPo Battery power shield, which will charge the battery if external power is available but switches to battery power in case the external power is disconnected.
There are multiple ways to power the shield like solar panels, USB and DC Jack. The shield also acts as a power bank to charge other 5V devices like mobile phones, MP3 players etc., through the USB port.
Interfacing camera with a Microcontroller board like Arduino is always a challenging task as the camera is a memory intensive module. But the Camera Shield for Arduino by ArduCam simplifies this task with a easy to use camera and simple user interface.
This article gave an overview of some of the commonly used Arduino Shields in the DIY community. This list of Arduino Shields is quite small compared to plethora of shields and expansion boards available in the market. I will add more shields in the future.

VICPAS supply 12.1"" touchscreen panel glass and Protective Film for Maquet Servo-i Ventilator repair replacement, all of them are brand new with 365 days VICPAS warranty.
The Servo-i ventilation platform can satisfy the ventilatoryneeds of every patient, from neonatal to adult. It canhandle the most acute phases of respiratory distressthrough recovery to the weaning phase. It continuouslydelivers outstanding ventilator treatment as gently aspossible, thanks to its ventilator performance, monitoringcapabilities, treatment options and tools.
Servo-i makes excellent ventilation quality availablein practically all environments: from ICUs to NICUs, viaintrahospital transport to MR examinations and hyperbaricchambers. Allowing you to choose treatmentoptions based on patient needs without having to worryabout less or worse ventilatory capabilities, or havingstaff trained on different ventilators for each specialapplication.
Servo-i is easy to learn and use. The system providesthe information you need when you need it, allowing afast and appropriate response from the user. An intuitiveinterface and simple, logical menus give easy access to allsettings. You can reach the most important parametersthrough direct access knobs. You are always informed,in control and able to react.
Related Siemens Getinge Maquet Ventilator Series Part No. :Maquet Ventilator Serise Description Inventory status Maquet Ventilator, 12.1""TFT-LCD module Touch Screen Panel Protective Film In Stock
Maquet Ventilator, 12.1""TFT-LCD module HMI Overlay Touch Screen Panel Glass In Stock Siemems Maquet Ventilator Description Inventory status



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey