
using a tft lcd to move a servo quotation

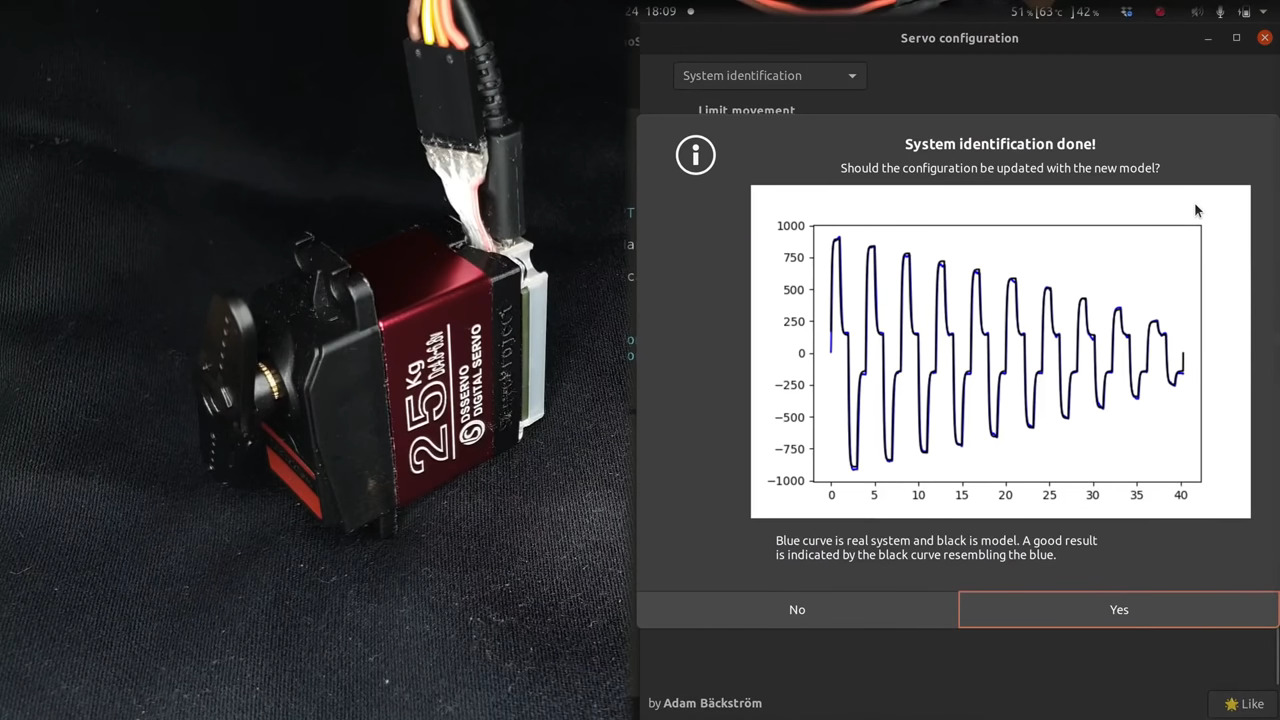
Today, we shall talk about how [Adam Bäckström] took a DS3225 servo and rebuilt it to improve its accuracy, then built a high-precision robot arm with those modified servos to show just how much of an improvement he’s got – up to 36 times better positional accuracy. If this brings a déjà vu feeling, that’s because we’ve covered his servo modifications before, but now, there’s more. In a year’s time since the last video came out, [Adam] has taken it to the next level, showing us how the modification is made, and how we ourselves can do it, in a newly released video embedded below.
After ordering replacement controller PCBs designed by [Adam] (assembled by your PCBA service of choice), you disassemble the servo, carefully setting the gearbox aside for now. Gutting the stock control board is the obvious next step, but from there, you don’t just drop the new PCB in – there’s more to getting a perfect servo than this, you have to add extra sensing, too. First, you have to print a spacer and a cover for the control board, as well as a new base for the motor. You also have to print (or perhaps, laser-cut) two flat encoder disks, one black and one white, the white one being eccentric. It only escalates from here!
Both of these disks go inside the motor. That is, you have to pry the servo’s DC motor apart, take its base with brushes out, then insert the encoder disks. Then, you snip and file away at the base’s plastic parts to free up as much space inside the motor’s base as possible, and add the optical encoders in the space you freed. Once that’s done, you solder the motor, the optocoupler and the potentiometer connections to the new controller PCB, and assemble the motor back together.
After you’re finished with the surgery, you have to calibrate your servo, for which [Adam] shows how to properly set it up mechanically, provides the code you need to run, and even nice GUI tools with controls to tweak servo parameters – his firmware gives us way more power than we could ever expect from a servo like this. All the knobs and sliders available to control coefficients, limits and curves, show us that [Adam] really does understand what makes for proper servo movement. Enough care is put into the documentation, the explanations and the tools for this modification process, that we don’t have to be anxious about being left behind if we are to follow these steps ourselves!
In a robot arm, small accuracy errors at the base scale into large errors at the arm’s end. If what you crave is high accuracy on a budget, and you have a bit of time to devote to modifying stock servos, this approach might be just what you need, and [Adam] has basically laid all the groundwork for you. Last time we talked about these servo modifications, one of our commenters suggested that this could be a viable successor to the goals of the OpenServo project, and we definitely see where they’re coming from. What if you wanted to go even less expensive than this? You could build a servo out of junk DC motors with a “3 cent” microcontroller, then.

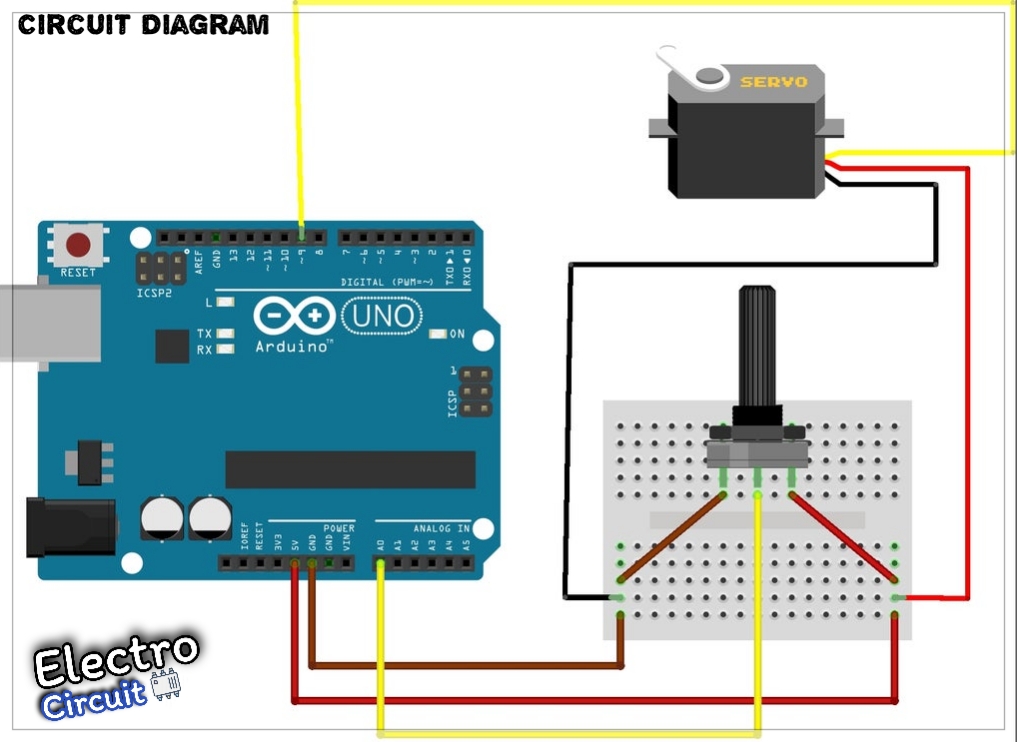
For controlling the position of the servo motor remotely using Bluetooth we use the MIT app inventor to make a wireless remote. In our app, we can set the position of the shaft of the servo using a slider and also with three buttons (0, 90, and 180).
Just make the proper connections and then upload the given code. You can read more articles on IoT and basic electronics published by us. For your convenience, we are also sharing screenshots of the work.
Take a servo motor and connect its positive power supply wire with the 5 volts pin of the Arduino and the negative supply wire with the GND pin of the Arduino.
NOTE: Please upload this code to the Arduino IDE but first you need to install
In this Arduino touch screen tutorial we will learn how to use TFT LCD Touch Screen with Arduino. You can watch the following video or read the written tutorial below.
For this tutorial I composed three examples. The first example is distance measurement using ultrasonic sensor. The output from the sensor, or the distance is printed on the screen and using the touch screen we can select the units, either centimeters or inches.
The next example is controlling an RGB LED using these three RGB sliders. For example if we start to slide the blue slider, the LED will light up in blue and increase the light as we would go to the maximum value. So the sliders can move from 0 to 255 and with their combination we can set any color to the RGB LED, but just keep in mind that the LED cannot represent the colors that much accurate.
The third example is a game. Actually it’s a replica of the popular Flappy Bird game for smartphones. We can play the game using the push button or even using the touch screen itself.
As an example I am using a 3.2” TFT Touch Screen in a combination with a TFT LCD Arduino Mega Shield. We need a shield because the TFT Touch screen works at 3.3V and the Arduino Mega outputs are 5 V. For the first example I have the HC-SR04 ultrasonic sensor, then for the second example an RGB LED with three resistors and a push button for the game example. Also I had to make a custom made pin header like this, by soldering pin headers and bend on of them so I could insert them in between the Arduino Board and the TFT Shield.
Here’s the circuit schematic. We will use the GND pin, the digital pins from 8 to 13, as well as the pin number 14. As the 5V pins are already used by the TFT Screen I will use the pin number 13 as VCC, by setting it right away high in the setup section of code.
As the code is a bit longer and for better understanding I will post the source code of the program in sections with description for each section. And at the end of this article I will post the complete source code.
I will use the UTFT and URTouch libraries made by Henning Karlsen. Here I would like to say thanks to him for the incredible work he has done. The libraries enable really easy use of the TFT Screens, and they work with many different TFT screens sizes, shields and controllers. You can download these libraries from his website, RinkyDinkElectronics.com and also find a lot of demo examples and detailed documentation of how to use them.
After we include the libraries we need to create UTFT and URTouch objects. The parameters of these objects depends on the model of the TFT Screen and Shield and these details can be also found in the documentation of the libraries.
Next we need to define the fonts that are coming with the libraries and also define some variables needed for the program. In the setup section we need to initiate the screen and the touch, define the pin modes for the connected sensor, the led and the button, and initially call the drawHomeSreen() custom function, which will draw the home screen of the program.
So now I will explain how we can make the home screen of the program. With the setBackColor() function we need to set the background color of the text, black one in our case. Then we need to set the color to white, set the big font and using the print() function, we will print the string “Arduino TFT Tutorial” at the center of the screen and 10 pixels down the Y – Axis of the screen. Next we will set the color to red and draw the red line below the text. After that we need to set the color back to white, and print the two other strings, “by HowToMechatronics.com” using the small font and “Select Example” using the big font.
Next is the distance sensor button. First we need to set the color and then using the fillRoundRect() function we will draw the rounded rectangle. Then we will set the color back to white and using the drawRoundRect() function we will draw another rounded rectangle on top of the previous one, but this one will be without a fill so the overall appearance of the button looks like it has a frame. On top of the button we will print the text using the big font and the same background color as the fill of the button. The same procedure goes for the two other buttons.
Now we need to make the buttons functional so that when we press them they would send us to the appropriate example. In the setup section we set the character ‘0’ to the currentPage variable, which will indicate that we are at the home screen. So if that’s true, and if we press on the screen this if statement would become true and using these lines here we will get the X and Y coordinates where the screen has been pressed. If that’s the area that covers the first button we will call the drawDistanceSensor() custom function which will activate the distance sensor example. Also we will set the character ‘1’ to the variable currentPage which will indicate that we are at the first example. The drawFrame() custom function is used for highlighting the button when it’s pressed. The same procedure goes for the two other buttons.
drawDistanceSensor(); // It is called only once, because in the next iteration of the loop, this above if statement will be false so this funtion won"t be called. This function will draw the graphics of the first example.
getDistance(); // Gets distance from the sensor and this function is repeatedly called while we are at the first example in order to print the lasest results from the distance sensor
So the drawDistanceSensor() custom function needs to be called only once when the button is pressed in order to draw all the graphics of this example in similar way as we described for the home screen. However, the getDistance() custom function needs to be called repeatedly in order to print the latest results of the distance measured by the sensor.
Here’s that function which uses the ultrasonic sensor to calculate the distance and print the values with SevenSegNum font in green color, either in centimeters or inches. If you need more details how the ultrasonic sensor works you can check my particular tutorialfor that. Back in the loop section we can see what happens when we press the select unit buttons as well as the back button.
Ok next is the RGB LED Control example. If we press the second button, the drawLedControl() custom function will be called only once for drawing the graphic of that example and the setLedColor() custom function will be repeatedly called. In this function we use the touch screen to set the values of the 3 sliders from 0 to 255. With the if statements we confine the area of each slider and get the X value of the slider. So the values of the X coordinate of each slider are from 38 to 310 pixels and we need to map these values into values from 0 to 255 which will be used as a PWM signal for lighting up the LED. If you need more details how the RGB LED works you can check my particular tutorialfor that. The rest of the code in this custom function is for drawing the sliders. Back in the loop section we only have the back button which also turns off the LED when pressed.
In order the code to work and compile you will have to include an addition “.c” file in the same directory with the Arduino sketch. This file is for the third game example and it’s a bitmap of the bird. For more details how this part of the code work you can check my particular tutorial. Here you can download that file:
drawDistanceSensor(); // It is called only once, because in the next iteration of the loop, this above if statement will be false so this funtion won"t be called. This function will draw the graphics of the first example.
getDistance(); // Gets distance from the sensor and this function is repeatedly called while we are at the first example in order to print the lasest results from the distance sensor

Please be aware we use "cookies" on this website. A cookie is a piece of data stored on a visitor"s hard drive to help us improve your access and identify repeat visitors. Cookies can also enable us to track and target the interests of our users to enhance the experience on our site. Usage of a cookie is in no way linked to any personally identifiable non-public information.
The PowerBox Royal SR2 once again sets new technical standards, offering a convincing array of features which until now have been the exclusive preserve of professional aviation. P² servo bus, 26 channels, 12-axis gyro, two pairs of regulators and a full-color screen - these are just a few of the technical refinements which the PowerBox Royal SR2 offers the ambitious pilot.
The PowerBox Royal SR2 is housed in a high-quality, extremely compact case with integral aluminum heat-sink. The large cooling area dissipates the heat generated by the four regulators, which are wired in pairs to provide energy for all 26 servos. Both regulator pairs can be set to any of four different voltages. This makes it possible to combine standard 6V servos with high-performance HV types, without additional regulator modules.
For the first time all the data relating to all the model’s servos can be monitored, and their parameters adjusted¹ from the transmitter. This development has been made possible by the introduction of our P²-BUS protocol, whose aim was to maintain complete control of all the components in the model. The PowerBox Royal SR2 has four fully independent P²-BUS interfaces, which can be set to two different voltage levels.
These interfaces can be used to connect servos with an integral P²-BUS, or conventional servos with the new P²-ServoBridge. The P²-ServoBridge is an adapter which converts the P²-BUS into a PWM signal for normal servos; it also has an integral infinitely variable electronic fuse.
This has allowed us to implement a bus system in the model which is significantly superior to standard PWM wiring in respect of security and performance.
All data relating to the receivers and power supply system are displayed on the full-color screen, and all settings are available in a carefully structured, bi-lingual menu which is easily understood.
Connecting the optional iGyro SAT converts the PowerBox Royal SR2 into a 12-axis gyro which has few equals in terms of functionality. The gyro can be set up to suit even the most complicated of models in just a few minutes. After this, the correct gyro gain is set from the transmitter in a test-flight using a rotary control. A whole series of supplementary Expert settings is available to allow the pilot to fine-tune the gyro effect to suit his unique individual preferences.
Naturally a GPS III sensor can also be connected to the PowerBox Royal SR2. This unit provides automatic gyro gain adjustment in relation to airspeed.

United States. Department of Commerce. Office of Field Services, United States. Department of Commerce. Office of Field Operations, United States. Department of Commerce

then, there is a valve which i will have to program a servo OR another electrical motor which is not the problem , i could make like u said a gear system but its not necessary cause there will be dust, water, and the gear need lubrication after time, i could make a chain system but there is no need to make thinks complex, i will attach a metal like ( l_l ) on the servo or other electrical motor to turn the handle of the header.
the video which i post is the meter measure, something similar to this will get attached on the hose, which will show how far away the reel is. even this is not the problem.
A multi-axis controller integrated with touchscreen interface, believed to be the most simplest one currently in the market. It comes with QuickSet intuitive software too. All you need to do is plug it, ...
... industrial PC and the 15″ touch screen. Design and ergonomics satisfy the highest demands. The hardware and software are state-of-the-art technology. The new CNC-S control and the new, revolutionary CNC-S ...
With DirectIndustry you can: Find the product, subcontractor or service provider you need | Find a nearby distributor or reseller| Contact the manufacturer to get a quote or a price | Examine product characteristics and technical specifications for major brands | View PDF catalogues and other online documentation

Other available tools: Face, Face and Chamfer, Turn and Chamfer (up to 2.50” turn length), ID/OD/Face tube head, center drill, drill, radius and special designed profile tools.
Optional equipment: Micro-drop mister, Auto Micro-drop mister, 3HP spindle motor, larger servo, 460V supply, Castors, 100 recipe storage, adjustable bar stand, Adjustable V-Channel lead in bracket, hanging chip bin.

It"s now ten years ago to the month that the first Competition SRS was introduced. At that time, it represented a milestone in the redundant deployment of receivers using our new type of bus technology. The unrestricted output assignment, servo matching and linking to early telemetry systems were unique features, and remained so for a long time.
Technology has continued to develop, and modellers" requirements have become more exacting. PowerBox Systems are proud to present their latest development: the PowerBox Competition SR2. Incorporating a new external look and the very latest technology, this single unit integrates more than twenty years of experience in the design and construction of airborne electronics.
The external changes are immediately evident: the most obvious and eye-catching feature is the new full-colour TFT screen, which is clearly legible even in full sunshine. The size of the screen has allowed us to include a self-explanatory menu structure which is so simple to use that its operation has raised not a single query from our test-pilots. Another obvious change is the large heat-sink, machined from solid metal which significantly enhances the performance of the power supply. At the same time we were able to reduce the overall size of the Competition SR2 substantially. The associated Sensor-Switch and TFT screen are also housed in a machined aluminium case, matching the quality appearance of the SR2 itself.
However, the most significant innovations only become evident once the unit is switched on. The main display contains all the essential data - including battery voltage, current, consumed capacity and all receiver-relevant information - which can be viewed at a glance. The screen also displays status messages concerning theiGyroSAT or GPS III, if connected to the system.
The menu system is clearly and logically laid out, and includes many new functions as well as the familiar menu points - and all in two languages: English and German. Important new features implemented in the new Competition SR2 include the most efficient and sophisticated iGyro technology ever developed by PowerBox-Systems.
Used in conjunction with the optional iGyroSAT sensor, the system offers twelve gyro axes which cater for every existing model variant. The highly refined Setup Assistant enables the pilot to set up complex models, such as types with dual thrust vectors, ailerons and tailerons, in just a few minutes. Once the Assistant has been completed, the transmitter channels are assigned, the directions of gyro effect are set, and the servos connected to the outputs.
Each gyro axis can also be finely adjusted individually from the transmitter using separate channels. If an initial test-flight shows up a need to fine-tune the iGyro to meet individual requirements, a whole series of Expert settings cover every possible need.
The servo matching feature is now displayed in graphic form on the screen, and the PowerBox Competition SR2 also allows the servo response to be adjusted using five curve points. A new development is automatic servo matching. It is a very simple matter to assign and select one or two servos in addition to the primary one, and these two or three servos can be matched accurately to each other in just a few seconds with a single button-press!
The Competition SR2 incorporates two independent door sequencers. The standard function is designed for a retractable undercarriage, while the second can be used to implement systems such as a latching canopy control system without any additional devices. The Setup Assistant is capable of setting up the first door sequencer in just a few minutes, and three modes of operation are available. The graphic on-screen display makes additional non-standard settings very easy to set up; the entire sequential process can be observed at a glance.
If you use a PowerBox or Jeti RC system, virtually all* the functions of the Competition SR2 can be controlled and adjusted from the transmitter. The SR2 caters for every aspect of telemetry for battery and receiver data with all supported systems. If a GPS III is connected, then GPS data are also available - limited only by the facilities of the RC system in use.

VICPAS supply 12.1"" touchscreen panel glass and Protective Film for Maquet Servo-i Ventilator repair replacement, all of them are brand new with 365 days VICPAS warranty.
The Servo-i ventilation platform can satisfy the ventilatoryneeds of every patient, from neonatal to adult. It canhandle the most acute phases of respiratory distressthrough recovery to the weaning phase. It continuouslydelivers outstanding ventilator treatment as gently aspossible, thanks to its ventilator performance, monitoringcapabilities, treatment options and tools.
Servo-i makes excellent ventilation quality availablein practically all environments: from ICUs to NICUs, viaintrahospital transport to MR examinations and hyperbaricchambers. Allowing you to choose treatmentoptions based on patient needs without having to worryabout less or worse ventilatory capabilities, or havingstaff trained on different ventilators for each specialapplication.
Servo-i is easy to learn and use. The system providesthe information you need when you need it, allowing afast and appropriate response from the user. An intuitiveinterface and simple, logical menus give easy access to allsettings. You can reach the most important parametersthrough direct access knobs. You are always informed,in control and able to react.
Related Siemens Getinge Maquet Ventilator Series Part No. :Maquet Ventilator Serise Description Inventory status Maquet Ventilator, 12.1""TFT-LCD module Touch Screen Panel Protective Film In Stock
Maquet Ventilator, 12.1""TFT-LCD module HMI Overlay Touch Screen Panel Glass In Stock Siemems Maquet Ventilator Description Inventory status

This tutorial is for our 1.8" diagonal TFT display & microSD in both the shield and breakout board configurations. These displays are a great way to add a small, colorful and br...

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

Nvis 3301C Educational Robot with 5 Axis Moving Arm an educational robotic arm based on ATmega 128 which provides knowledge about basic mechanical design concepts and also deals with very fascinating features like Servo motor interfacing and controlling, wireless control, graphical TFT interfacing etc. This Moving Arm driven by the RC servo motors consists of 5 degree of freedom (DOF) which can be represented by the rotating base, shoulder, elbow, wrist and the gripper. DC motors at its base makes it a moving robotic arm.



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey