
esp32 with camera and tft display ov7670 fifo quotation

I CAN WALK AGAIN! yaaay.. Back in the lab making videos.This video is the first of a miniseries showing how to interface a camera to a microcontroller (ESP32...

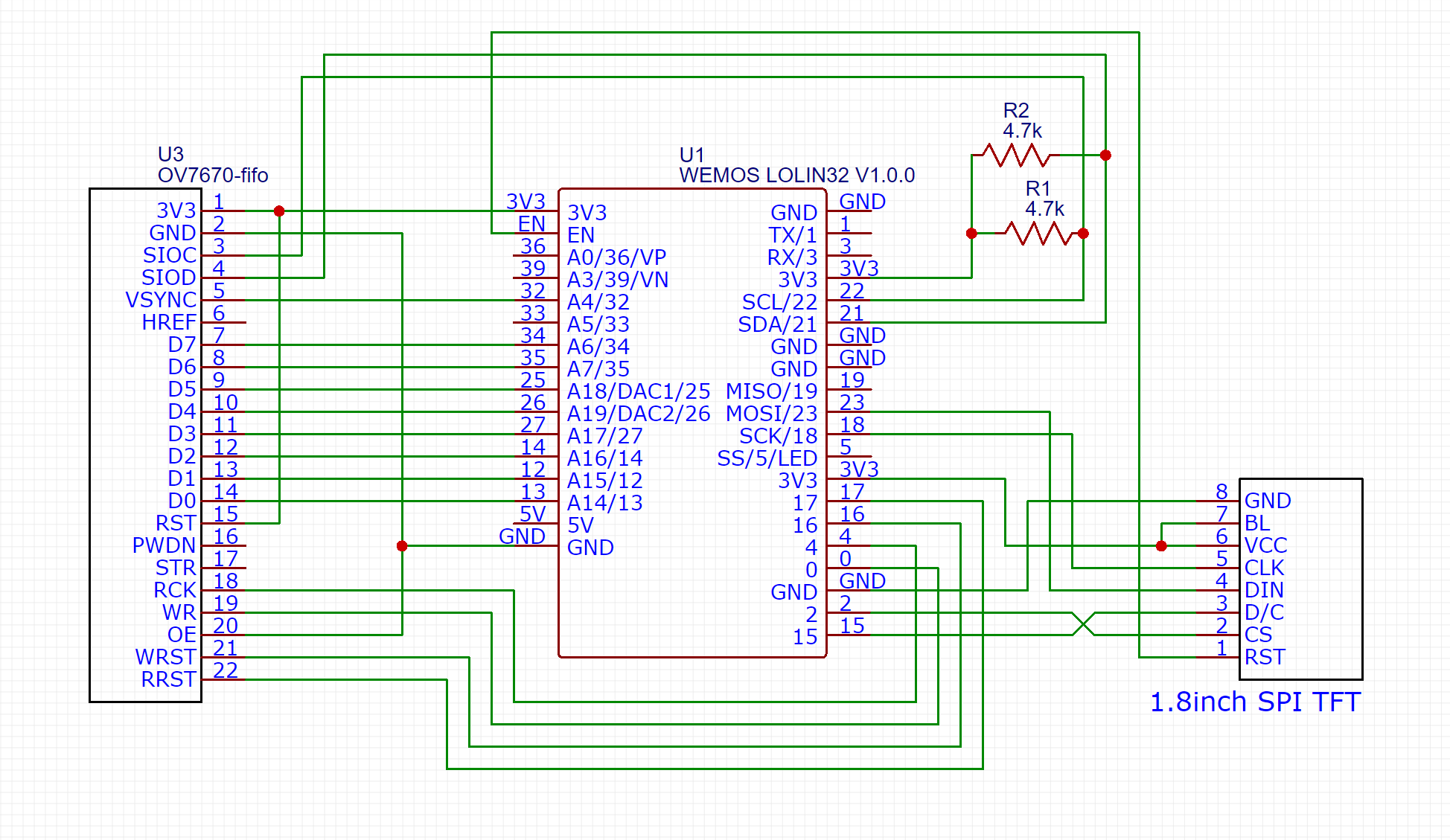
The parts used here are the LOLIN32 microcontroller. Any ESP32 board can be used. The code is currently independent of the actual processor, so you can use also different platforms.
The camera is the cheap OV7670 with FIFO (AL422b). The camera supports up to VGA resolution but the FIFO can only store 3MBit. This is just sufficient for QQVGA or section of higher resolutions.
The “real-time” output is done on the 1.8″ SPI TFT display. Due to the single data line, the update rate is really limited. To be able to run the display on 3.3V the jumper on the back side must be closed.
The pin connections of the devices can also be found in the code. The definitions can be changed except for MOSI and SCK for the SPI interface which is native on these pins on the ESP32. Using other microcontrollers, the corresponding native SPI pins have to be used.
There are some limitations configuring the pins of the ESP32. Pins 34, 35, 36(VP), 39(VN) are read-only. Those can’t be used for I2C, the clock (XCLK) or TFT signals. Pins 0, 2 and 5 are used as boot signals. Those should not be used as inputs to avoid problems while programming. Pin 5 is also attached to the LED on the LOLIN32 board. Pins 6-11 (if available) are a no go since those are wired to the SPI flash memory connected to the ESP32.
[{"id":"9ecc75dd.22e2e8","type":"mqtt in","z":"5a254896.947618","name":"","topic":"home/camera1","qos":"1","broker":"171132c7.ece67d","x":168.8333282470703,"y":222.0666732788086,"wires":[["784e5a67.89db04"]]},{"id":"6bd0fd9c.4f3c14","type":"ui_template","z":"5a254896.947618","group":"d960fd60.7c918","name":"","order":0,"width":"6","height":"5","format":"","storeOutMessages":true,"fwdInMessages":true,"templateScope":"local","x":612.83349609375,"y":222.0667266845703,"wires":[[]]},{"id":"784e5a67.89db04","type":"function","z":"5a254896.947618","name":"camera iframe","func":"msg.template = \"<iframe frameborder="0" width="100%" height="100%" src="http://\" + msg.payload + \""></iframe>\";\nreturn msg;","outputs":1,"noerr":0,"x":408.83337783813477,"y":222.20002460479736,"wires":[["6bd0fd9c.4f3c14"]]},{"id":"171132c7.ece67d","type":"mqtt-broker","z":"","broker":"localhost","port":"1883","clientid":"","usetls":false,"compatmode":true,"keepalive":"60","cleansession":true,"willTopic":"","willQos":"0","willPayload":"","birthTopic":"","birthQos":"0","birthPayload":""},{"id":"d960fd60.7c918","type":"ui_group","z":"","name":"Camera","tab":"e694697d.4bec28","order":1,"disp":false,"width":"6"},{"id":"e694697d.4bec28","type":"ui_tab","z":"","name":"Camera","icon":"dashboard","order":5}]
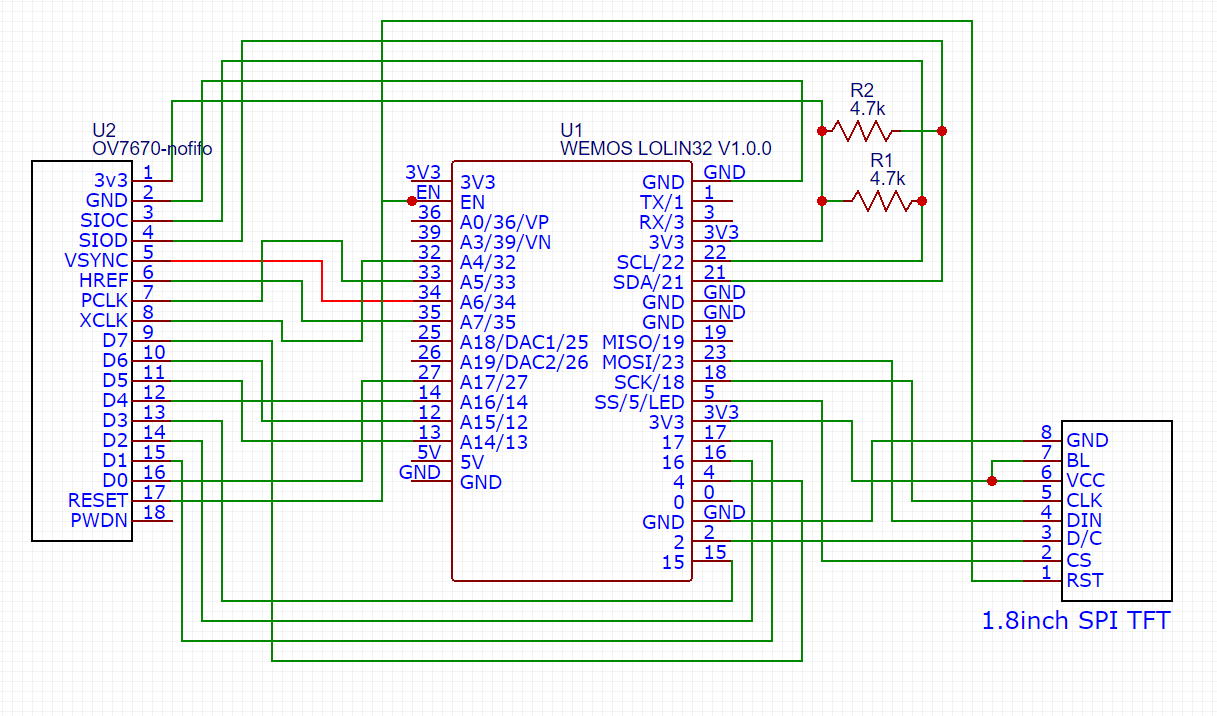
This project shows how to record images with the ESP32 and the OV7670 camera without FIFO. An SPI TFT display is supported and a basic web server provides the images in the local network.
To get more details about the camera registers and timings please check out the project using the FIFO version and the complete playlist on this series.
The camera is the cheap OV7670 without the FIFO. The camera supports up to VGA resolution. However, we are not able to fit a whole VGA frame into the memory of the microcontroller.
The “real-time” output is done on the 1.8″ SPI TFT display. Due to the single data line, the update rate is really limited. To be able to run the display on 3.3V the jumper on the back side must be closed.
The pin connections of the devices can also be found in the code. The definitions can be changed except for MOSI and SCK for the SPI interface which is native on these pins on the ESP32.
But there are some limitations. Pins 34, 35, 36(VP), 39(VN) are read-only. Those can’t be used for I2C, the clock (XCLK) or TFT signals. Pins 0, 2 and 5 are used as boot signals. Those should not be used as inputs to avoid problems while programming. Pin 5 is also attached to the LED on the LOLIN32 board. Pins 6-11 (if available) are a no go since those are wired to the SPI flash memory connected to the ESP32.

I do not move the scanlines out of the DMA buffer. I consume the data in real time and free up the DMA buffer before it is needed again. There are two DMA buffers used alternately. So while the I2S hardware is filling one, we need to be emptying the other one.
So I keep the camera and the I2S capture engine running continuously. After each VSYNC I immediately stop and restart the I2S engine. More about that in a moment.
After each VSYNC I can momentarily stop and restart the I2S engine, but quickly enough so that I know the next scanline will be the first of the next frame.
I do this in case we do lose scanlines or pixels somehow. (I tested this by momentarily grounding the PCLK signal from the camera to confuse the I2S engine. Of course I get bad-looking frames, but once I remove
32-bit "set-these-bits-mask" with three one-bits in the correct places. Direct port writes allow us to also use a mask to clear all 8 data lines at once.
Previously I was unable to capture 320x240x2-byte frames due to memory limitations on the ESP32. But the LCD has its own frame-buffer memory sufficient for this task.
So when we take a snapshot, we detach the camera from the data bus and allow the ESP32 to read back the image data from the LCD framebuffer in useful sized chunks.
The ESP32 can then send the data chunk-by-chunk to a host PC over a serial interface, or perhaps store a file in the SPIFFS file system, or on a Micro SD card.
Because the eight camera data lines no longer come into the ESP32, I free up enough GPIO pins for some extra control signals, reading the touch screen, and having a second serial port to transmit the image to a host PC.
The "common bus" shared between three devices - the camera, the ESP32, and the LCD, requires that we are able to detach the camera data or the ESP32 data from the bus. So the ESP32 takes on the role of bus controller.
To achieve this I added two common ICs to the design: a 74LS244N bus line driver sits between the camera data lines and the LCD bus lines. It allows me to tri-state the 8 camera data lines (put the output pins into high impedance so that the ESP32 / LCD can use the bus without interference).
The 74LS244N driver only has 8 lines, I needed a 9th one for the pixel clock (PCLK). When the camera data is flowing onto the bus, we need its pixel clock (PCLK) to also be routed to the LCD_WR clock line on the LCD. But when the ESP32 is using the shared bus, it needs control of the LCD_WR line. I implemented a 2-input A/B multiplexor to route either PCLK or a GPIO line to LCD_WR using a single 74LS00N chip. The 74LS00N contains four 2-input NAND gates, enough logic to build a multiplexor for 2 inputs.
In addition, I used a 74LS244N bus driver IC and a 74LS00N quad NAND gate IC that I happened to have available. This bus driver is now obsolete, but there are plenty of newer 74LS244x replacements that should do the job as well or better.
The camera data flows through the bus driver onto shared wires that also connect to the LCD and the ESP32. The bus driver has two enable lines - each controls 4 bus output lines. Here I tied the two enable lines together so that a single GPIO pin from the ESP32 can allow the camera data through, or block the data by tri-stating the output lines.
In software, by toggling this tri-state control GPIO line, we allocate the bus to either allow Camera->LCD communication, or LCD<-->ESP32 communication.
When we give the bus to the camera, we also tri-state the ESP32 GPIOs (in fact, making them INPUT is good enough) so that the camera and ESP32 devices do
The VGA timing specs from the camera datasheet (QVGA and QQVGA are subsampled from this timing) have what I call a CountDown interval - the time between the rising edge of VSYNC and the rising edge of the first HREF on the first scan line) of 20 line times. At 25 fps VGA the CountDown interval is 1568 microseconds - and a bit longer for QVGA, which is what we use.
this time that our main loop can take the bus away from the camera and can overlay our own pixels onto the existing image, or set up the destination area for the next data to the LCD, look for touch events, etc.
We also set a camera register that allows us to blank PCLK when no pixel data is present: our LCD doesn"t understand the camera synchronization, and any free-running or spurious clock pulses would cause it to latch invalid data from the bus. This frees us from strict at-the-exact-PCLK timing constraints - it doesn"t matter if we detach or attach the camera onto the bus at any time during CountDown.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.
OV7670 VGA Camera + FIFO Buffer AL422B, based on the popular OV7670 image sensor. With the onboard 384KB FIFO chip AL422B the camera module can buffer an entire VGA frame at 30fps frame rate, and it enables the low speed microcontroller boards to take photos.The camera module is powered from a single +3.3V power supply.

Alibaba.com offers 4961 vga module products. About 19% % of these are lcd modules, 5%% are integrated circuits (old), and 1%% are audio & video cables.
A wide variety of vga module options are available to you, such as original manufacturer, odm and agency.You can also choose from tft, ips and standard vga module,

. Step 6. . OV7670 Arduino Camera Sensor Module Framecapture Tutorial OV7670 Arduino Camera Sensor Module Framecapture Tutorial: Description The camera module is powered from a single +3. In this video, we will learn how to connect / how to interface / how to use OV7670 ( OV 7670 ) camera module ( Arducam, ArduinoCam ) with Arduino UNO Step by. class="algoSlug_icon" data-priority="2">Web. class="algoSlug_icon" data-priority="2">Web. Preliminary Datasheet OV2640 Color CMOS UXGA (2. . . . Most 16-bit TFT and OLED displays are also big-endian, so it"s straightforward to move data directly from one to the other.
. . The goal of this project is to implement a sensor MCU-based network (camera/sensors being the nodes) embedded stm32 sensors mcu ov7670 stm32wb55 ky018 ky002. . Vision Angle: 25 degrees. . Vision Angle: 25 degrees. For low light operation, it is sensitive highly Operating voltage is low for portable apps Correction of shading in the lens Enhancement range of edge is auto adjust Auto adjustment of saturation level It supports flash strobe mode & LED Scaling support. class="algoSlug_icon" data-priority="2">Web. 900,000+ datasheet pdf search and download Datasheet4U offers most rated semiconductors data sheet pdf: OV7670 Matched Datasheet: No: Part Number: Description: Manufacture: PDF: 1: OV7670 (OV7670 / OV7671) CMOS VGA CameraChip:.. . Operating Temperature: -30 to 70 deg C. . Please note that regular shipping like singapore post might take 45-60 days to deliver, epacket 20 -35 days to deliver Thank you for understanding.
The OV7670 is an image sensor manufactured by OmniVision. class="algoSlug_icon" data-priority="2">Web. 元器件型号为PPW5154RFLF的类别属于无源元件电阻器,它的生产商为TT Electronics plc。厂商的官网为:. Close suggestions Search Search. Datasheet: Description: OmniVision Technologies. class=" fc-falcon">msp430的定时器A和定时器B他们的配置是否一样? 我开始准备用定时器A来产生一个pwm的波形的,但是考虑到我的超声波模块已经占用了我的p2端口,所以我打算用定时器b来产生pwm波形,书上的讲解不是很详细,是不是他 的配置完全一样,只需要改一. . HDL cam_read. The aim of the above changes is to get the camera timing signals (PCLK, HREF, VSYNC) running slow enough so that the Arduino Uno can accurately capture them and process the signals. An external oscillator provide the clock source for camera module XCLK pin. XCLK is the input clock that makes the camera run. class="algoSlug_icon" data-priority="2">Web. class="algoSlug_icon" data-priority="2">Web. . Manufacturer Part #:OV7670 Product Category: IC Chips Manufacturer:Rochester Electronics Description: Package: CSP Quantity: 329112 PCS Lead Free Status / RoHS Status: Lead free / RoHS Compliant Lead Time: 3 (168 Hours) Data Sheet: OV7670 Datasheet Rochester Electronics OV7670 CAD Models Available download format Altium Eagle OrCad PADS KiCad.



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey