
using a tft lcd to move a servo arduino uno quotation

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

One of the first uses of servo motors was to control the steering mechanisms of RC airplanes, cars, and boats. Today, you can find them in robots, industrial equipment, and many different Arduino projects.
Servo motors are capable of precise control of the rotation of a motor shaft. They allow you to set an exact angle of rotation with code, or with inputs like joysticks, push buttons, or potentiometers.
In this tutorial, we’ll take a look at how servo motors work and how to use an Arduino to control them. We’ll also look at two example programs you can run on the Arduino. The firstprogram will show you how to control the direction and position of a servo using two push buttons. Thesecondprogram will show you how to use a potentiometerto controlthe position of the servo.
BONUS: I made a quick start guide for this tutorial that you can download and go back to later if you can’t set this up right now. It covers all of the steps, diagrams, and code you need to get started.
Servos are DC motors that have been geared down to reduce the speed and increase the torque of the motor. They also have built in circuits that control the angle of rotation one degree at a time, and hold that position until another input is received. Servos will rotate a certain number of degrees depending on the width of the electrical pulses delivered by the Arduino:
The servo expects one pulse every 20 ms. For most servos, a 1 ms pulse results in a zerodegree rotation, a 1.5 ms pulse results in a 90 degree rotation, and a 2 ms pulse results in a 180 degree rotation.
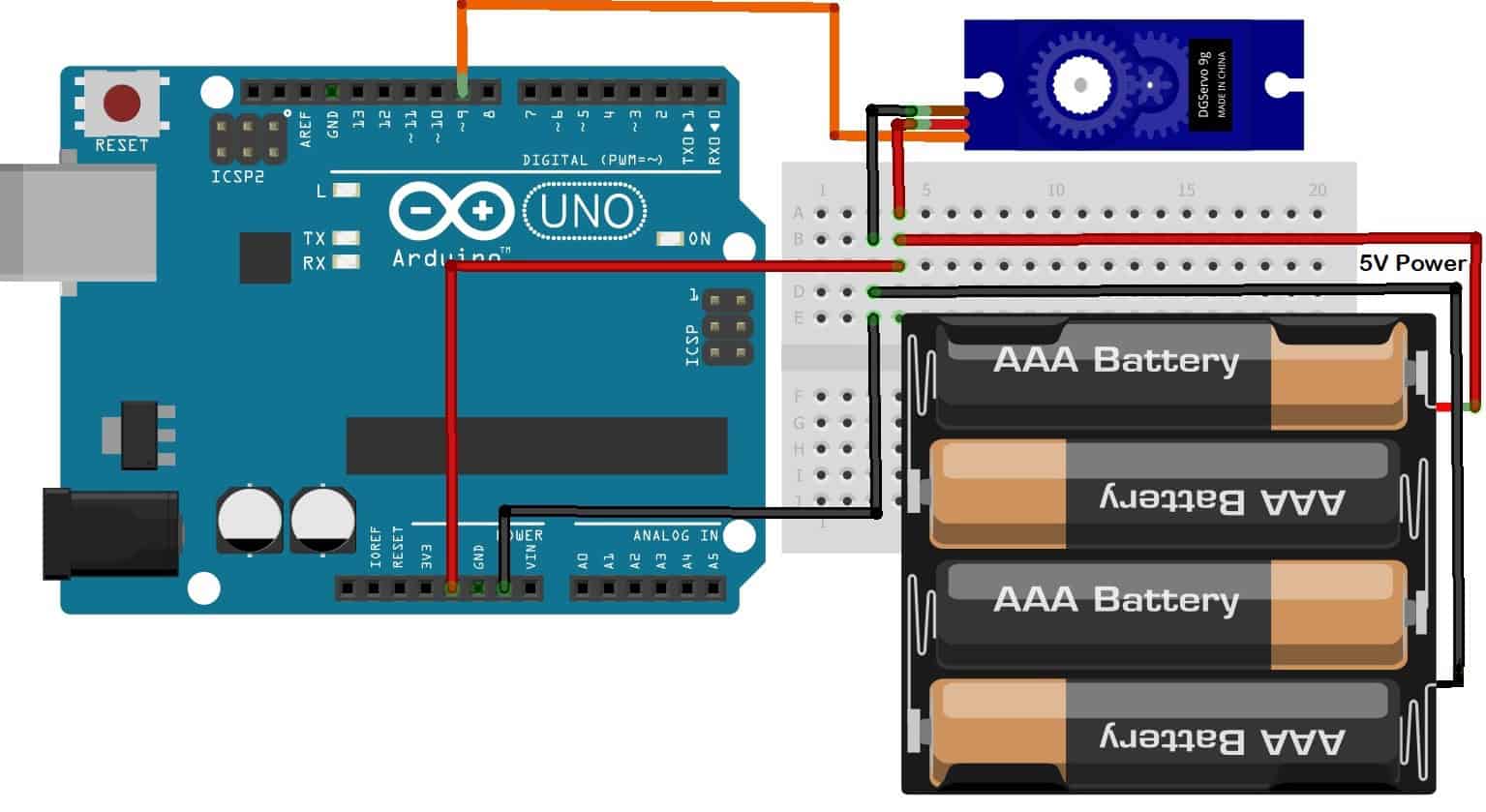
Depending on the servo you use (larger ones especially), you should use a separate DC power supply to power it. Otherwise, the current drawn by the servo could damage your Arduino.
If you want to learn more about the Arduino, check out our Ultimate Guide to the Arduino video course. You’ll learn basic to advanced Arduino programming and circuit building techniques that will prepare you to build any project.
We’re going to use the Arduino’s built-in Servo library to program the servo. This library is included with the Arduino IDE, so there’s no need to install it.
The servo motorshould move to 0degrees, pause for one second, then move to 90degrees, pause for one second, then move to 180degrees, pause for one second, then start over.
On the first line we include the Servo library with #include
In the setup section, we initialize the servo with the attach() function. The attach() function takes one parameter – the pin that the servo is connected to. So we have servo1.attach(servoPin).
To move the servo, use the write() function with the angle of rotation as the argument. The angle is in degrees, from 0 degrees to 180 degrees. The angle changes the pulse width sent to the servo motor, which then determines the amount of rotation. We’re calling the function through the servo1 object, so we use servo1.write(angle), with 0 degrees, 90 degrees, and 180 degrees.
The write() function will work for most servos, but not all. Some servo motors have a range of 180 degrees, some have a range of 90 degrees, and some have anywhere in between. Using the write() function only allows for a maximum of 180 steps. However, there is a function that allows up to 1000steps, called writeMicroseconds(). If you want more precise control of your servo, you may want to use the writeMicroseconds() function instead of write().
In this sketch, we’ve replaced each write() function with a writeMicroseconds() function. Change the angular values from (0, 90, 180) degrees to (1000, 1500, 2000) microseconds. Upload and run the program using the same hardware setup. For a servo motor capable of a range up to 180, the values will be 1000 microseconds = 0 degrees, 1500 microseconds = 90 degrees, and 2000 microseconds = 180 degrees.
Depending on the servo motor you are using, you may notice a difference. Interestingly on my setup, while monitoring the pulses on an oscilloscope, I noticed that when using servo1.write(0);, the pulse width was only about 700microseconds, not 1000 which is the way the function should work when set at zero degrees. But when using servo1.writeMicroseconds(1000); the output was exactly 1000microseconds.
After uploading the compiled code, open the Serial Monitor on your Arduino. As you push on either button, the servo should increase or decrease as shown on the serial monitor. Initially, the code will set the servo at 90 degrees. Use the button connected to pin 3 to increase the angle. When you reach 180 degrees, the high end of the rotation, the LED connected to pin 5 will turn on. When you reach the low end of the range which is 0 degrees, the LED connected to pin 6 will turn on.
To determine the result of the button push, a whilestatement verifies the button and the angle of the shaft. while (digitalRead(pin3) == HIGH && pos < 180) determines that the button was pushed (HIGH) and the angle is less than 180, so the program adds one degree and loops on. The second button while (digitalRead(pin4) == HIGH && pos > 0) determines that the button was pushed (HIGH) and the angle is greater than 0. This causes the angle to decrease by one and loops on. The LedHi and LedLow level for LEDs are each controlled by anif statement that checks the angle to see if it’s 0 or 180. The LEDs are turned off as soon as the angle changes in each of the two while statements.
After uploading the code, open the serial monitor on your Arduino. As you adjust the potentiometer, the rotation of the servo will change accordingly. When you reach the lowerlimit of the range, the Low LED will turn on, and as you reach the upper limit, the High LED will turn on.
analogRead() takes in the voltage from the potentiometer as an analog signal. It accepts the values of the full range of input accepted in an Arduino (0-5V). It captures it as an integer in the range of (0-1023). So for example, a DC value of 0V would be captured as the integer 0; a full range value of 5V would be captured as the integer 1023, and half the input range of 2.5V would be captured as the integer 512, half of 1023.
The next line of code servo1.write(val); is the write() command that takes the integer stored in val as the argument and applies it to the servo. The servo receives a pulsefrom the servo1.write(val); and the pulse width is determined by the value of val. The servo uses the width of this pulse to determine its rotation.
“As an Amazon Associates Program member, clicking on links may result in Maker Portal receiving a small commission that helps support future projects.”
Servo motors can be found in robotic arms, cameras, lathes, CNC machines, printing presses, and other engineering applications where precision and repeated movement are required. Servo motors are often comprised of DC motors that use feedback mechanisms to move with great precision from one position to another. The low-cost servos that are found in maker projects use potentiometers to register voltages as positions on the rotating plane of the servo. Often, servo motors contain a series of gears that either speed up or slow down and smooth the movement of the DC motor. Lastly, servo motors use a circuit to control and send feedback information to a given controller, which in our case is an Arduino board (read more about servo motors here). In this tutorial, an Arduino board will be used to power and control a small servo motor. The basics and composition of an SG90 will be explored, and the application of several servo codes and applications will be given for another type of servo motor, the MG90S. The goal of this project is to introduce users into the workings of a servo motor, how PWM (pulse-width modulation) controls a servo motor, and how Arduino can interface with servo motors to produce desired movements to great precision.
The SG90 (datasheet here) is a 9 gram servo motor that can rotate 0 - 180 degrees (roughly) at a rate of about 0.3 seconds (0.1s/60 degrees). The SG90 is used in low-cost projects, typically with motorized vehicles and robotic arms. The SG90 is a great tool for education and prototyping - as it is inexpensive and easy-to-use. The SG90 is also compatible with the Arduino software, which will be used in this tutorial to rotate the servo in order to view how the gear reduction from the small DC motor gear to the larger and slower gear used in applications with the motor. See the next section for full Arduino wiring and code instructions.
A video of the gear reduction process is shown below, where the DC motor is sent through a gear reduction stage, with a stabilizing gear phase (the middle pole in the image above with the motor and potentiometer), and finally the slower rotating gear which is used for applications (the top gear). The video shows the SG90 under 5.0V powered by an Arduino board, rotating 1 degree roughly every 17 milliseconds for 90 degrees and then stopping.
The MG90S is another small servo motor that is similar to the SG90, but weighs slightly more (14g) and has metal gears instead of plastic. The MG90S is also slightly faster than the SG90, which is a further justification for why it is used here. Both the MG90S and the SG90 are wired the same and use similar code. Right out of the box, MG90S servos work with the prescribed Arduino ‘Servo’ code, which rotates the servo back and forth based on its built-in servo library. The Arduino library is a great place to start, as it really only requires a few lines of code. First, the servo needs to be wired to an Arduino board. The Arduino Uno board is used below. The MG90S technically has a working voltage input range of 4.8V - 6.0V, so any 5.0V Arduino should work, assuming it has pulse-width modulation (PWM) capabilities. Fortunately, the Arduino uses a 20ms PWM pulse in its servo library, which happens to be the period of the PWM pulse on both servos, so the programming needed to get the servos functioning is minimal.
The simple code to replicate the .gif in the previous section is given below. The process carries out the following procedure:First, rotate to 0 degrees to determine the starting point of the motor
Now that the basics of wiring and coding a servo have been introduced, more advanced topics on using and controlling servos can be explored. In this section, the focus will be on controlling a servo using the serial port. In short, an inputted angle to the serial port (in degrees) will tell the Arduino to turn the servo to the given position. This type of control could be useful for robotic arms, camera control, or any situation where the angle is known and needs to be changed according to a user’s direct input.
Some of the implementations used here have also been used in previous tutorial, where an RGB LED was controlled using the serial port on an Arduino. That tutorial can be found here where the control of Arduino pins is explored in great detail. Here, the focus is just on controlling a single Arduino pin to change the angle of the servo motor using pulse-width modulation.
A joystick can also be used as a control tool for a servo. The methodology involves some geometry and understanding of how a joystick works, but it is not too complicated. A joystick rotates in a 2-D plane (most have a third dimension as well - force, but that will not be discussed here). Using Arduino again, we can record the x and y-direction movements of the joystick and translate them into angular movements.
where the black dot in the triangle is the knob that is moved on a joystick, and the motion convention follows the arrows. The greek symbol θrepresents the angle with which the joystick is operating, and will also determine where the servo motor will be positioned.
An implementation of the angle has been carried out in Arduino using its ‘atan2()’ function which outputs the approximate angle between two directional components. Below is the full Arduino code that implements the inverse tangent for the joystick values. It also incorporates an offset which makes the movements of the joystick mimic the angular movements of the servo. The angle output by the inverse tangent spans the negative values, so the angle has been corrected to both rotate for negative values and mimic the rotational convention of the MG90S servo. Lastly, a jitter reduction routine is used to prevent the servo from moving too much without much joystick movement. All of this is part of the code below:
Servo motors are necessary for engineering applications both in the consumer market and industrial market. Servos can be found in aircraft, robotic arms, CNC machines, printers, cameras, and a multitude of other mechanically-functioning areas that require speed, precision, and effectiveness in control. In this tutorial, two servo motors were explored. One servo motor, the SG90, was used to demonstrate the inner components of a servo motor. The second servo, the MG90S, was used to demonstrate two particular applications of control. Using Arduino as the control point, the serial input was used as a way of inputting a desired angle and having the servo rotate to that position. Second, a joystick was used to respond to mechanical movements in two-dimensions, which were transformed into an angular response to make the servo rotate. This tutorial is the first entry in a series dedicated to motors and actuators, which will help engineers and makers explore the world of electromechanical movements.
Let’s take a look into a simple interfacing project this time. This is actuator interfacing with Arduino Uno and the actuator being servo motor, specifically SG90 servo motor. SG90 is a lightweight (just 9g) and tiny servo motor which has quite good output toque. We can use Arduino IDE to code this servo and control its movements precisely. We can rotate 180 with this servo motor.
This project uses SG90 servo motor interfaced with Arduino Uno which is programed to turn the servo motor from 0 degrees to 180 degrees and back to 0 degrees.
For demo purposes, with zero load on the servo motor, we are powering the servo motor using Arduino 5V pin. But it is important to keep in mind that the motor should be powered separately. This servo motor has input voltage of 4.8V to 6V DC. It is recommended that the servo motor should be powered externally (using a dedicated power supply) and the voltage should be within the accepted range. The maximum current draw from Arduino is 0.8A only. So when we use an external power supply, it will make sure that the Arduino board won’t be damaged due to excess current draw.
There is a common problem when dealing with SG90 (or even MG90S) that is the overshooting or undershooting. This is a problem has a bit to do with Control Systems. In general, we can say, the systems that are overdamped miss the target value, that causes the “undershoot”. This means, the servo would not really reach 0 to 180 degrees or other specified value. Whereas those systems that are underdamped go over the target. This causes the situation to “overshoot”. This is when the servo motor exceeds the specified degree and sweeps more area than it is supposed to do.
There are a couple of fixes available online for this overshoot/undershoot problem. You could use a better servo motor like “Tower pro MG 995” servos. This is not a micro servo like SG90 but it is more precise and it can also deliver more power. There are other servo motors that are used for model aircraft building; they are known to be more precise. They give very good results but are quite expensive. If you really want to use SG90 servo motor only and get precise degree turn, then, consider the following points to get better results:
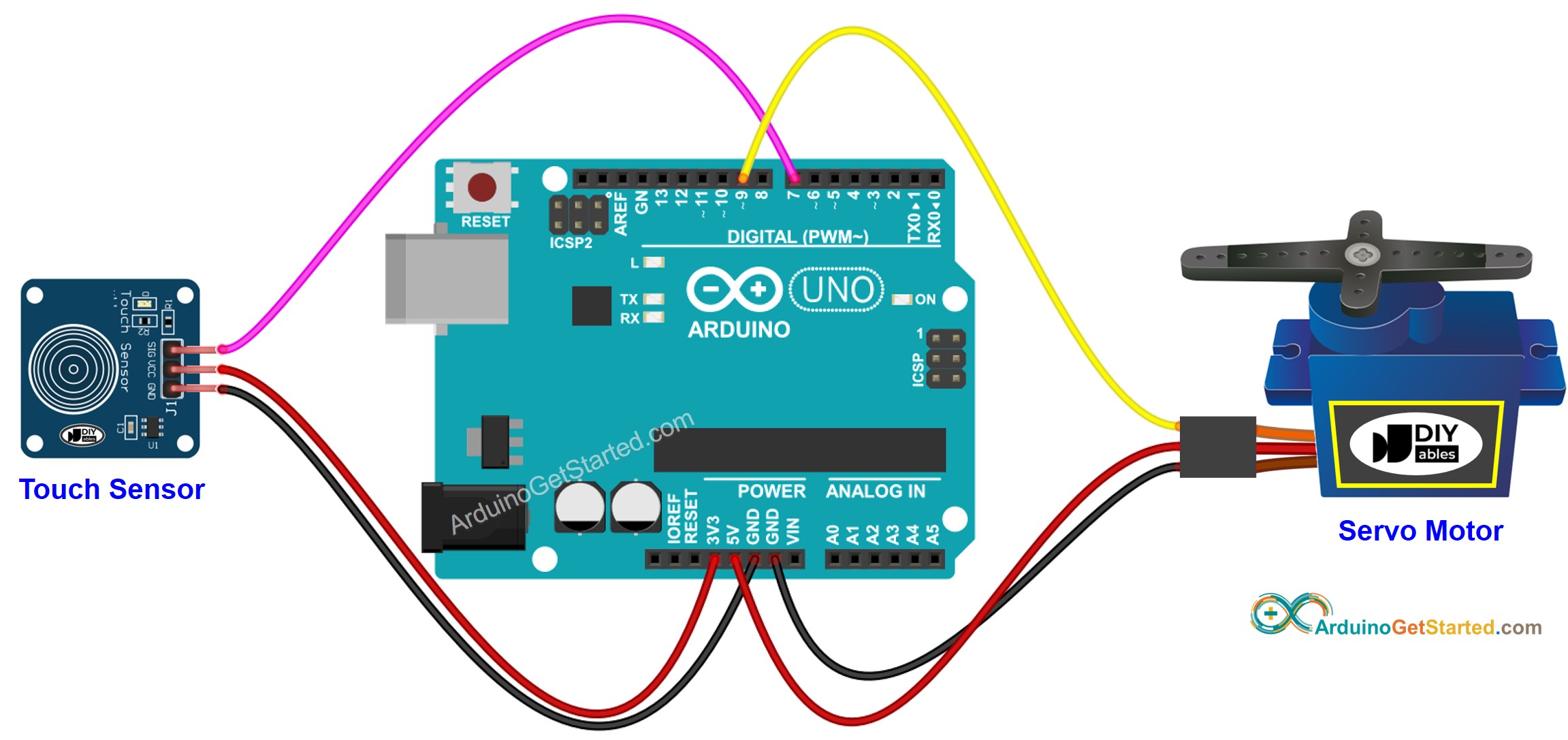
The circuit connections for this project are very simple as the servo motor has only 3 pins. The red wire of the servo goes to 5V pin of Arduino Uno. The Black wire of the servo goes to Arduino Uno’s ground pin (GND). And the yellow wire (called the control pin of servo) goes to Arduino pin 8. This completes the circuit connections of the servo motor with Arduino Uno.
First, we need to include a library called “Servo.h” to be able to control various servo motors. If you don’t already have this library in your Arduino IDE, then you can go to “tools” à “Manage Libraries…” and type “Servo” in the Library Manager and install the one from “Michael Margolis, Arduino”.
Next, we declare a variable called “servo”. In void setup function, we use the servo.attach function to tell the Arduino board that the control pin of the servo motor is attached to pin 8 of Arduino (the function attaches the servo variable to the pin). The servo.write function is used to tell the servo the degree to which it should turn. At the beginning the default state of servo is considered as zero degree we keep this as origin position that is zero degrees. So we write servo.write(0). Then a delay function is used to create a delay of 2ms.
Next, in void loop, we use the servo.write function again to tell the servo to turn to 180 degrees and the delay function will hold this position for 1ms. Then the servo is instructed again to go back to 0 degrees, as we had initialized before. The delay function will hold this position for 1ms. This is repeated until the power is disconnected or servo is disconnected.
This is a beginner friendly project. It focuses on controlling an actuator, SG90 Servo motor, using Arduino Uno and Arduino IDE. It provides a strong basic foundation in dealing with actuators and helps beginners jump into more fun with actuators.

Hi guys, today, I will show you how to use a servo motor with an Arduino. This tutorial is ideal for beginners because it is easy and it gives them the foundation to build interesting projects like robots for which servos are commonly used.
Servo motors are high torque motors which are commonly used in robotics and several other applications due to the fact that it’s easy to control their rotation. Servo motors have a geared output shaft which can be electrically controlled to turn one (1) degree at a time. For the sake of control, unlike normal DC motors, servo motors usually have an additional pin asides the two power pins (Vcc and GND) which is the signal pin. The signal pin is used to control the servo motor, turning its shaft to any desired angle.
Servo’s have high current requirement so when using more than one servo motor with the Arduino, it is important to connect their power connections to an external power supply as the Arduino may not be able to source the current needed for the servo. Since we will be using just one servo in this tutorial its fine to power it with an Arduino.
Servo motors generally have three pins/wires, this includes the VCC, GND, and the Signal pin. The Signal pin is the one used to feed the control signal from the microcontroller to the servo, to get the servo rotate to a particular angle.
The signal pin was connected to the digital pin 8 of the Arduino because it is a PWM pin. Servo directions are sent from the microcontroller to the servo motor as PWM pulses.
The code for this project is quite easy thanks to the very comprehensive and conciseservo.h library developed by the Arduino team to facilitate the use of servo motors in Arduino projects. The library makes it easy to turn the servo at different angles using a single command. The library comes pre-installed in the Arduino IDE removing the need for us to download and install.
With this done, we proceed to the void setup() function. we start the function by attaching the servo object created to pin D8 of the microcontroller, after which we center the servo, turning it to zero degrees.
With that done, we are ready to move the servo in any direction we desire, and we will be doing this under the void loop function. Thanks, to the servo.h library all we need to do, to rotate the servo to an angle we desire, is to pass the desired angle as an argument into the servo.write() function. To demonstrate this, a for-loop was used to turn the servos at several angles in one direction and another loop was used to turn the servo back to where it started.
Copy the code above and upload to your Arduino and servo motor setup, after a few time, you should see the servo motor start turning as shown in the gif below.
That’s it for this tutorial guys, the code above can be expanded in several ways for use in different projects involving servo motors, what cool thing will you be building with the servo motor? feel free to share via the comment section.

This tiny adapter can solve the problem of buying and keeping different charger/adapters for your C-type port gadgets. It is simply plug and play converter. So ..
The DS51150 is one of our strongest standard size servos we keep. It is a high quality digital servo with metal gears with dual ball bearings and has an operating..
The DS51150 is one of our strongest standard size servos we keep. It is a high quality digital servo with metal gears with dual ball bearings and has an operati..
The DS5180 is one of our strongest standard size servos we keep. It is a high quality digital servo with metal gears with dual ball bearings. The servo has 270 deg..
The DS5180 is one of our strongest standard size servos we keep. It is a high quality digital servo with metal gears with dual ball bearings. The servo has 270 d..
A VGA breakout board is a small circuit board that allows you to convert a VGA video signal into individual color and sync signals. VGA, which stands for Video Graphics Array, i..
The RS485 Converter for TTL Digital Pins, CMOS, IO Modbus RTU is an electronic device widely used for communication between machines and sensors, acting in order to send..
The Zero is a simple and powerful 32-bit extension of the platform established by the UNO. The Zero board expands the family by providing increased performance, enabling a var..
This is a very handy DIN Rail mount programmable timer with 16 different programmable settings which are to-the-minute accuracy. The LCD displays the real time (..
The XGecu T56 Original Programmer is a universal programmer that support over 28000+ devices from MCU, EEPROM, Flash (NAND and NOR) and eMMC units. The device is contr..
Resistor networks also known as resistor arrays feature multiple resistors connected together in a circuit pattern. They primarily act as a voltage divide..
Schottky Rectifiers are semiconductor diodes that exhibit very low forward voltage drop with a very fast switching action. The reverse recovery times of Sch..
This is the ESP32S-DEV development board based on ESP-WROOM-32, features WiFi + Bluetooth connectivity, onboard USB CH340 and keys. What"s more, all the I/O pins of ES..
When it comes to measuring voltages, amperage, or current, we usually use tools like multi-meter to do that job. However, it has proven to be difficult to use suc..
This is a simple digital 3 digit counter. The unit counts from 0 ~ 999 and returns back to 0 once it passes 999. The counter can be set to either count when the unit..
The ADS1115 analog-to-digital converter provides high-precision, 16-bit precision at 860 samples/second over I2C. The chip can be configured as 4 single-ended in..
The Qwiic Adapter Board provides the perfect means to make any old I2C board into a Qwiic-enabled board. This adapter breaks out the I2C pins from the Qwiic connectors to pins t..
Resistor networks also known as resistor arrays feature multiple resistors connected together in a circuit pattern. They primarily act as a voltage divider..
Resistor networks also known as resistor arrays feature multiple resistors connected together in a circuit pattern. They primarily act as a voltage divider, w..
Resistor networks also known as resistor arrays feature multiple resistors connected together in a circuit pattern. They primarily act as a voltage divide..
Resistor networks also known as resistor arrays feature multiple resistors connected together in a circuit pattern. They primarily act as a voltage divide..
SimpleFOC is an Arduino-compatible opensource FOC project. After many years of contributions from developers, it has become very mature in low-power BLDC applica..
This PS2 Connector Breakout Board is intended to be used with the PS2 remote controller. The pins are broken out to 2.54mm pitch. The breakout board makes it easy way t..
The PureThermal 3 FLIR Lepton Smart I/O Module is a hackable thermal webcam module for the FLIR Lepton Longwave Infrared (LWIR) camera core. It ships pre..
This Makerbase Simple Stepper Controller will allow you to perform manual control over the operation of stepper motors. With it, you can use the potentiometer to..
The SIP 40 way header connector kit is very versatile connector set when prototyping or building your next project. We offer this kit in the colour red with a 2.54mm leg..
JST-SH connector standard is compact in design, but quite challenging to crimp and assemble. For quick prototyping we thought we give you a hand and bundle 4 x ..
This cordless hot glue gun has outstanding handling due to its compact design. A 3-5 minute heat-up time allows projects to start quickly, without w..
These 7-pin Du Pont (aka "Dupont") connectors are commonly found on Servo motor cables or Breadboard ready devices. They have a 2.54mm Pitch (pin spacing) and will co..
Du Pont (aka "Dupont") Shells are made of durable ABS plastic. They have a 2.54mm Pitch (pin spacing) and will connect to standard pin headers easily.
The SIM7020 is Multi-Band NB-IoT module solution in a SMT type . It has strong extension capability with rich interfaces including UART, GPIO etc. The module provides ..
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it. ..
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it. ..
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it. ..
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it. ..
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it...
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it...
An inductor, also called a coil is a two-terminal electrical component that stores energy in a magnetic field when electric current flows through it...
The slot type photoelectric sensor is composed of an infrared light emitting diode and an NPN phototransistor with a groove width of 5.9 mm. As long as the non-trans..
The STM32F411xC/xE devices are based on the high-performance ARM Cortex -M4 32-bit RISC core operating at a frequency of up to 100 MHz. Its Cortex -M4 core fea..
This is a simple dual DC motor driver based on the proven L298N dual h-bridge IC. You can drive this board directly from your Arduino(TTL level signaling) and it ..
The SparkFun BME680 Environmental Sensor is a breakout that combines a gas sensor with temperature, humidity and barometric pressure sensing for a complete env..
This is an easy-to-assemble pan/tilt bracket kit that utilizes servos to move on two axes fit for camera and helping-hand applications. Everything is included to get t..
The Hi-Link HLK-20M05 5V/20W Switch Power Supply Module is a plastic enclosed PCB mounted isolated switching step-down power supply module. It can supply 5V DC from..
This is a simple breakout board for the popular XBee product from Digi. This board breaks out all 20 pins of the XBee to a 2.54mm standard spacing dual row header. Th..
These are multilayer ceramic capacitors (MLCCs) which are generally the capacitor of choice for applications where small-value capacitances are need..
JST-SM series interlocking connectors makes wire to wire connections easy and reliable. The JST-SM is a polarized connector and thus prevents reverse connection. An loc..
The solar charge controller is especially designed with high-performance, efficiency and excellent quality. These controllers are designed for home solar power sys..
The solar charge controller is especially designed with high-performance, efficiency and excellent quality. These controllers are designed for home solar power sys..
More and more hobbyists taking advantage of surface mount technology these days. With affordable tools electronics enthusiasts are shrinking their projects down to new ..
More and more hobbyists taking advantage of surface mount technology these days. With affordable tools electronics enthusiasts are shrinking their projects down to new le..
More and more hobbyists taking advantage of surface mount technology these days. With affordable tools electronics enthusiasts are shrinking their projects down to new l..
These are multilayer ceramic capacitors (MLCCs) which are generally the capacitor of choice for applications where small-value capacitances are neede..
The USB Type C Cable allows you to connect your latest smartphones, tablets and any other upcoming devices with a USB type C connector to a host computer, wall charger..
The FAN5331SX is a general purpose fixed-frequency Boost Converter designed to operate at high switching frequencies in order to minimize switching n..



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey