
nanopi neo tft display quotation

After several days of study, I know that the new kernel version has cancelled the fbtft_device.ko method to drive fbtft, and changed it to the DT method. I also learned about the pinctrl subsystem, and tried to write an overlay by myself. After loading, the kernel has been found SPI device. The screen still doesn’t light up after the device is turned off. I don’t know the reason. I’m still looking for it. Can you help me?
These messages mean that there are four CPU cores working online simultaneously. Each core"s temperature is 26.5 degrees in Celsius, the scheduling policy is on-demand and the working frequency is 624MHz. You can set the frequency by running the following command:
Currently the NanoPi NEO2 Black only works with a RTL8821CU USB WiFi dongle, plug and play. After this module is connected to the board it will by default work under AP mode and the hotspot"s name is "rtl8821cu-mac address" and the password is "password";
The NanoPi NEO has gotten support for kernel Linux-4.14 with Ubuntu Core 16.04. For more details about how to use mainline u-boot and Linux-4.14 refer to :Building U-boot and Linux for H5/H3/H2+
Visit this link download link and enter the "sources/nanopi-H3-bsp" directory and download all the source code.Use the 7-zip utility to extract it and a lichee directory and an Android directory will be generated.You can check that by running the following command:
Armbian releases Armbian_5.20_Nanopineo_Debian_jessie_3.4.112 and Armbian_5.20_Nanopineo_Ubuntu_xenial_3.4.112 for the NanoPi NEO. You can refer to its home page for more details.
The 1-bay NAS Dock is an expansion board which can be used to connect an external hard disk to a NanoPi NEO.It uses JSM568 USB3.0 to SATA IC and communicates with a NanoPi NEO via USB interface. It works with a 2.5" SATA hard disk.It uses TI"s DC-DC chipset to convert a 12V input to 5V. It has a power switch for users to turn on/off the device.It supports an onboard RTC battery. FriendlyElec migrated mainline Linux-4.14 kernel and Debian-Jessie with OpenMediaVault. Together with FriendlyElec"s customized aluminum case you can quickly assemble a storage server. Here is a hardware setup :1-bay_NAS_Dock
The UNO Dock module is an Arduino board compatible with Arduino UNO and works with Arduino programs.You can use Arduino IDE to run all Arduino programs on the Dock.It also exposes the NanoPi NEO"s pins.It converts 12V power input to 5V/2A output.You can search for various code samples from Ubuntu"s ecosystem and run on the Dock. These features make it a powerful platform for IOT projects and cloud related applications. Here is a hardware setup:UNO Dock for NanoPi NEO v1.0
The Power Dock for NanoPi NEO is a high efficiency power conversion module. It provides stable and reliable power source. Here is a hardware setup:Power Dock for NanoPi NEO
The NanoHat Proto is an expansion board which exposes NEO"s various pins.It has an onboard EEPROM for data storage.Here is a hardware setup:NanoHat Proto
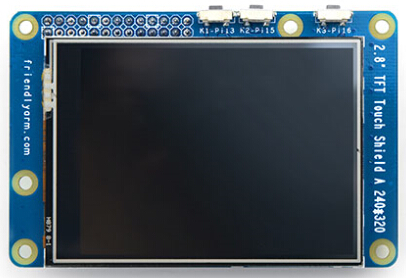
The Matrix-2"8_SPI_Key_TFT module is a 2.8" TFT LCD with resistive touch. It uses the ST7789S IC and XPT2046 resistive touch IC. It has SPI interface and three configurable user keys.Here is its wiki page Matrix - 2"8 SPI Key TFT
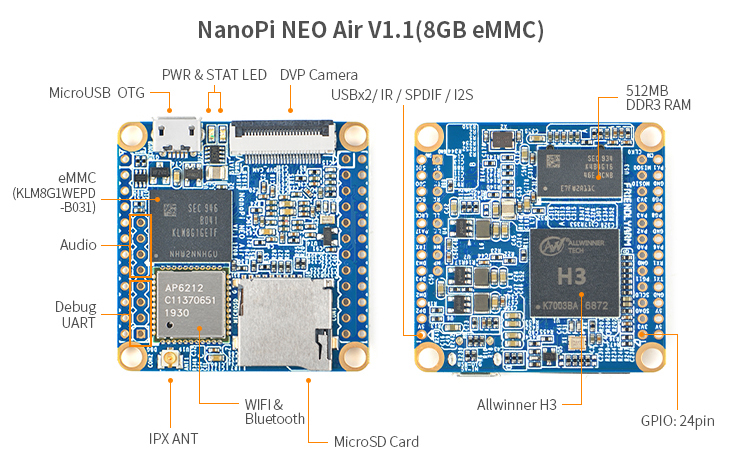
The NanoPi NEO Air is a 40 x 40mm open source ARM board for makers.It uses an Allwinner H3 Quad Core A7 processor at 1.2GHz. Its pins are compatible with the NanoPi NEO(V 1.2) and its 24-pin header is compatible with Raspberry Pi"s GPIO pin headers.
The NanoPi NEO AIR features 512MB of 16bit wide DDR3 RAM, 8GB eMMC and one MicroSD slot. It has WiFi & Bluetooth and DVP camera interface(YUV422). The DVP camera interface can support friendlyarm"s 5M-pixel camera module
By default the NanoPi NEO Air"s OpenWrt is set to AP mode. The default AP hotspot"s name is like "OpenWrt-10:d0:7a:de:3d:92" and it doesn"t have a password. You can connect a smart phone or PC to it.
The NEO-Air has only one network device: wlan0. Therefore if you want to visit the internet from the board you need to switch from AP mode to STA mode. Here are the steps.
The NanoPi NEO Air has gotten support for kernel Linux-4.14. For more details about how to use mainline U-boot and Linux-4.14 refer to :Building U-boot and Linux for H5/H3/H2+
Visit this link download link and enter the "sources/nanopi-H3-bsp" directory and download all the source code.Use the 7-zip utility to extract it and a lihee directory and an Android directory will be generated. You can check that by running the following command:

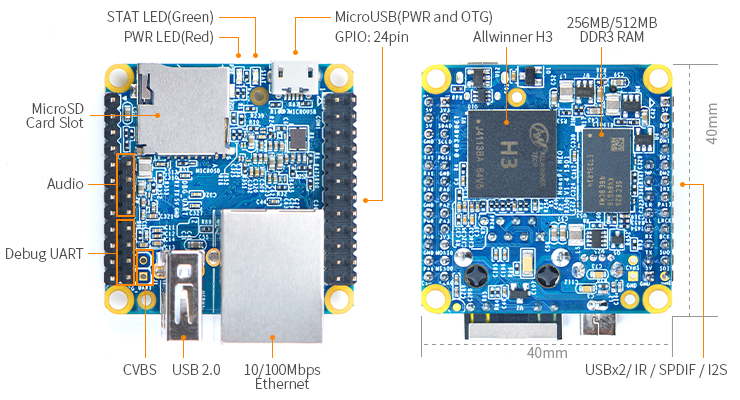
NanoPI NEO is a single-board system from FriendlyARM with a RAM memory of 256 MB. It is equipped with the Allwinner H3 system offering 4 Coretex-A7 cores. Each core can operate at a frequency of 1.2 GHz. In addition, the board has a Mali-400MP2 graphics processor clocked at 600 MHz. The board is equipped with, among others, an RJ45 port, 2 USB ports (1 USB 2.0 port and 1 micro-USB 2.0 connector), a micro SD memory card slot and interface ports such as: USB (2 additional USB 2.0 ports), UART ( 2 ports RS232), I2C, SPI, PWM, GPIO and audio (microphone input and line audio output). The system is powered by 5V, power consumption according to the manufacturer does not exceed 2A. The system"s operation is responsible for the Ubuntu Core distribution, specially prepared by the manufacturer, based on the Linux kernel version 3.4. The system is not factory installed.
I had spec"d out a DC boost to around 6.5, for a 5v clean output for the audio card. The nanopi"s 5v line gets so polluted by all the fast switching from various sources. I used the same circuit all those cheap MT3608 boost converters from china use. They work, in my experience, and you can get 40 of them, shipped to USA, for about $6. The 5v reg is an MIC2920, just because I had them in stock. Their LDO characteristics aren"t bad, either. There is another 3.3v line for the STM32, mainly so it"s ADCs are a little bit cleaner. I used a MAX604, since I had it around.
I also had to tweak the software on the nanopi, as the reset and boot0 pins have to always be initialized. I use stm32flash to do the business. Since the nanopi doesn"t have a compiler, I rsync the bin from my desktop the board, then have a bash script which handles the flashing. It works reliably now!
I had spec"d out a DC boost to around 6.5, for a 5v clean output for the audio card. The nanopi"s 5v line gets so polluted by all the fast switching from various sources. I used the same circuit all those cheap MT3608 boost converters from china use. They work, in my experience, and you can get 40 of them, shipped to USA, for about $6. The 5v reg is an MIC2920, just because I had them in stock. Their LDO characteristics aren"t bad, either. There is another 3.3v line for the STM32, mainly so it"s ADCs are a little bit cleaner. I used a MAX604, since I had it around.
I also had to tweak the software on the nanopi, as the reset and boot0 pins have to always be initialized. I use stm32flash to do the business. Since the nanopi doesn"t have a compiler, I rsync the bin from my desktop the board, then have a bash script which handles the flashing. It works reliably now!
I was getting pretty scared that the 2.2 inch TFTs I ordered at the end of august wouldn"t show up before the deadline, so I bought two for about double the cost, shipped locally. I still hadn"t tested my footprint from the first revision, so its all pretty up in the air whether its going to work. To fit in space for a hypothetical fan that may or may not be needed, I moved the nanopi a bit, and flipped the screen layout to give me about 42mm. I knew I could flip the screen in software, I just didn"t expect it to be that easy. Oh, and I messed up by one GPIO on the pinout from my prototype, so I had to tweak it in software. Then it worked like a charm!
Thats the hardware part of all of this. A single toggle switch pulls the enable pin on the initial DC-DC boost converter. That takes the power from either the battery XOR the microUSB input. Then it goes straight into the nanopi, which does its own 3.3 volt regulation. A separate 5v and 3.3v are sent to the USB soundcard and STM respectively. The TFT is powered by the nanopi"s 3v3 line. Those all operate as you"d expect.
The STM sends OSC messages to the nanopi over UART 1 at 115200 baud, which gets interpreted by a python script, and sent to either puredata, the screen (using the curses lib), or some system command. The OSC messages honestly fly all over the place. The STM32 sends and receives messages, python handles All of the messages, so it has to have a handler for everything, and puredata sends/recieves over OSC. Any system script ALSO sends/receives OSC using oscdump/oscsend. Its basically a madhouse of udp messaging. Python does seem to keep up well, using 3-6% of cpu at any given time. The STM reception and PD reception processes are threaded in python.



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey