
stm32 blue pill wires with 1.8 tft lcd display factory
For any microcontroller project, interfacing a display unit with it would make the project a lot easier and appealing for the user to interact with. The most commonly used display unit for microcontrollers is the 16×2 Alpha numeric displays. These types of displays are not only useful to display vital information to the user but can also act as a debugging tool during the initial developmental stage of the project. So, in this tutorial we will learn how we can interface a 16×2 LCD display with the STM32F103C8T6 STM32 Development board and program it using the Arduino IDE. For people who are familiar with Arduino this tutorial will just be a cake walk since they both are very similar. Also to learn more about STM32 Blue Pill Board follow our getting started tutorial.
As told earlier the Energia IDE provides a beautiful library which makes the interfacing a piece of cake and hence it’s not mandatory to know anything about the display module. But, would didn’t it be interesting to show what we are using!!
The name 16×2 implies that the display has 16 Columns and 2 Rows, which together (16*2) forms 32 boxes. One single box would look something like this in the picture below
A single box has 40 pixels (dots) with a matrix order of 5 Rows and 8 columns, these 40 pixels together forms one character. Similarly, 32 characters can be displayed using all the boxes. Now lets take a look at the pinouts.
Out of all these 16 pins, only 10 pins are to be used mandatory for the proper working of the LCD if you want to know more about these LCD display jump to this 16x2 LCD article.
As you can see the complete connection is made over a breadboard. We need a FTDI board to program the STM32 Microcontroller. So similar to our previous tutorial, we have wired the FTDI board to STM32, the Vcc and ground pin of the FDTI programmer is connected to the 5V pin and ground pin of the STM32 respectively. This is used to power the STM32 board and the LCD since both can accept can +5V. The Rx and Tx pin of the FTDI board is connected to the A9 and A10 pin of the STM32 so that we can program the board directly without the boot loader.
Next the LCD has to be connected to the STM32 board. We are going to use the LCD in 4-bit mode, so we have to connect the 4 data bit pins (DB4 to DB7) and the two control pin (RS and EN) to the STM32 board as shown in the STM32F103C8T6 LCD interfacing circuit diagram above. Further the table below will help you in making the connection.
As told in this tutorial we will be using the Arduino IDE to program our STM32 Microcontroller. But, the Arduino IDE by default will not have the STM32 board installed, hence we have to download a package and prepare the Arduino IDE for the same. This is exactly what we did in our previous tutorial getting started with STM32F103C8T6 using Arduino IDE. So if you have not installed the required packages fall back to this tutorial and follow it before you continue here.
Once the STM32 Board is installed in the Arduino IDE, we can start programming. The program is very similar to that of an Arduino board, the only thing that will change are the pin names since the notations are different for STM32 and Arduino. The complete program is given at the end of this page, but to explain the program I have split it into small meaningful snippets as shown below.
One noticeable advantage of using Arduino for programming our microcontrollers is that Arduino has readymade libraries for almost every famous sensors and actuators. So here we start our program by including the LCD library which makes the programming a lot easier.
In the next line we have to specify to which GPIO pins of the STM32 we have connected the LCD display control and data lines. To do this we have to check our hardware, for ease you can also refer to the table given at the top which lists the pin names of LCD against the GPIO pin of STM32. After mentioning the pins we can initialise the LCD using the LiquidCrystal function. We also name our LCD as “lcd” as shown below.
Next we step inside the setup function. Here first we have mention what type of LCD we are using. Since it is a 16*2 LCD we use the line lcd.begin(16,2). The code inside the void setup function gets executed only once. So we use it to display an intro text which comes on the screen for 2 seconds and then gets cleared. To mention the position where the text has to appear we use the function lcd.setcursor and to print the text we use the lcd.print function. For instance lcd.setCursor(0,0) will set the cursor at first row and first column where we print “Interfacing LCD” and the function lcd.setCursor (0,1) moves the cursor to second row first column where we print the line “CircuitDigest”.
After displaying the intro text we hold the program for 2 seconds by creating a delay so that the user the can read the intro message. This delay is created by the line delay(2000) where 2000 is the delay value in mill seconds. After the delay we clear the LCD using the lcd.clear() function which clears the LCD by removing all the text on LCD.
Finally inside the void loop, we display “STM32 –Blue Pill” on the first line and the value of seconds on the second line. The value of second can be obtained from the millis() function. The millis() is a timer which gets incrementing right from the time the MCU is powered. The value is in form of milli seconds so we divide it by 1000 before displaying it on our LCD.
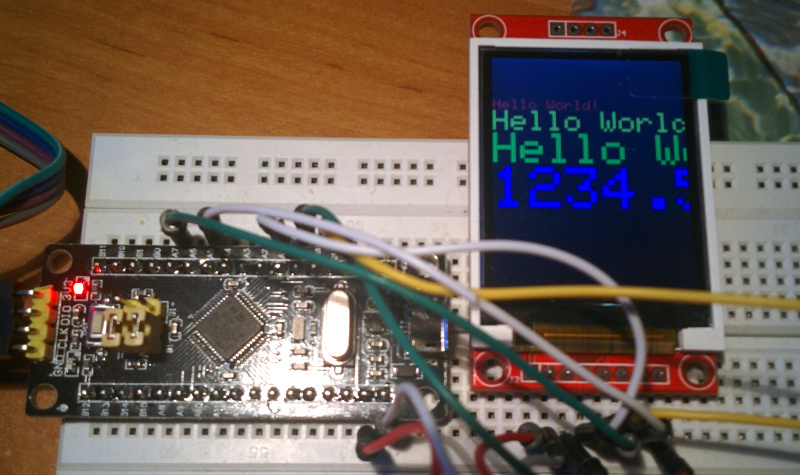
Make the connections as show in the circuit diagram and use the code given below on Arduino IDE. Go to tools and make sure the right board is selected as done in getting started tutorial. Also, before uploading the program make sure the boot 0 jumper is set to 1as shown in the image below and press the reset button. When the upload button is pressed is code should get uploaded and the message will be shown on LCD as show in the image below.
As discussed in the above paragraph you should be able to notice the output as soon as the code is uploaded. But this program will not work the next time when you power up the board, since the board is still in programming mode. So once the program is uploaded the jumper on boot 0 should be changed back to 0 positions as show below. Also now since the program is uploaded to the STM32 board already we do not need the FTDI board and the whole set-up can be powered by the micro-USB port of the STM32 board as well as shown below.
This is just a simple interfacing project to help use the LCD display with STM32 board, but further you can use this to build cool projects. Hope you understood the tutorial and learnt something useful from it. If you had faced any problem in getting it to work, please use the comment section to post the problem or use the forums for other technical questions. The complete working of LCD display with STM32 can also be found as a video given below.
We will organize the kinds of display interfaces we offer, and how they differ. You will get to know what kind of external and internal interfaces we have and what are their main applications.
First, let us start with dividing internal and external interfaces in LCD modules. Internal interface of display means it used inside the device. Those are usually the embedded interfaces that are not visible, and we do not have access to them as the users of the device. External interfaces, on the other hand, are connected to the device using a cable. Once we have defined internal and external interfaces, both of these categories come as universal or image transfer interfaces.
A protocol defines the rules of information exchange, where the interface is the medium. The example here could be the language. When I use my voice to communicate with other people, my voice is an interface. Over this interface my voice is being sent to other people’s ears, and the protocol is the language used. Right now, I am using the English protocol. If you understand the protocol, you understand what I am saying. If I switch to a different language, Polish or some other language that you do not understand, you have the same interface, you will still hear me, but because of a different protocol, you do not understand me anymore. In this article we will talk only about interfaces, how to connect devices to each other. We will not focus on protocols.
Let’s try to get the interfaces right. For internal interfaces, interfaces embedded into the device, we have universal interfaces and image transfer interfaces. Universal display interface can send other data, not only an image. Being universal, they are not perfect for image transfer, because in most of the displays used nowadays, the image transfer is one of the most demanding. The bit rate, the data transfer needed for the image transfer is rather high. Higher that many universal interfaces can offer. If we need to send an image every once in a while, then we don’t need very high bandwidth. If we do not need live video stream, then we can use some of the internal universal interfaces such as SPI, I2C or even slow interfaces as RS232 or UART.
The first universal interface will be SPI (Serial Peripheral Interface). This interface is serial, used for communication between a host, in SPI called a Master, and devices called Slaves. One host can communicate with many slaves. To select the Slave, we use the Chip select or SS line and then we use two data lines, Master output or Master input. And of course we have to define the clock, to synchronize the data, because this is a clock synchronized interface.
It can be fast but is not fast enough for live video. The baud rate can be 1 MBd, but it can also be 10 MBd or even 50 MBd on the SPI or QSPI. QSPI is a Quad SPI, a kind of modification of SPI that is faster. But still this interface is very universal, we can use it to connect memory or some input and outputs internally in our device. In the display universe the SPI is used for simple displays, for small size displays, where we can transfer the image relatively fast, because the resolution is low. The maximum size for SPI display interface would be 3.5 inch, 320 by 240 pixel TFT displays. If we have higher resolution, image transfer will be too slow to use SPI even with a high-speed SPI.
If, for example, the Master is sending some data, the only thing Slaves can do is to receive it. And then we need to wait a little bit for the Master to finish. We can then respond as Slave to Master. In I2C Slave selection works a little bit different than in SPI, where we had a Chip Select line (CS line) or SS line to select from. In I2C we first need to send the logical address to the interface that is being written by Slaves. In general, this procedure is slow and universal interface used also to connect the simple memory and some other I2S that we have around our microcontroller on the PCB. It is very useful, but usually not used for image transfer. This interface is very popular in the display world for touchscreens. Most of the embedded touch screens that we use have I2C interface because the touchscreen does not generate many data. We only have coordinates of the finger or few fingers at most, that need to be sent back to the microcontroller, to the device processor. The slow baud rate is good enough for the touchscreen, but not enough for the image.
That is not a case for SPI or I2C, because we have a clock there that gives the speed to every device. Then each device works according to the clock. In UART we do not have a clock. It is rather not used for image transfer. The UART, or SPI, or I2C can be used for low resolution displays. For high resolution displays we need an Intelligent Display, a display that will generate the image internally and through these slow universal interfaces we only send commands, or we send the image once, the image is being stored into the internal memory of the intelligent display, that we will use later sending the commands. You can find Riverdi’s intelligent display line on our website: https://riverdi.com/product-category/intelligent-displays/.
These Riverdi products are very advanced Intelligent Displays, made with Bridgetek controllers. The controllers use SPI and QSPI for communication. That means your software, your system, your microcontroller can be simple. You can use SPI interface to drive them, and you can still have high resolution image, even as high as 1280 by 800 pixels in 10.1-inch LCD displays. So, please remember that if you want to use a slow universal interface and have a high-resolution image, you need to use an Intelligent Display.
There are also the internal image transfer interfaces. The image transfer interface allows continuous high speed image transfer. Internal transfer is high enough to refresh the display many times per second. This is called the refresh rate of a display. When you go to a display, monitor, or TV set specification, you will see refresh rate or maximum refresh rate parameter. If it’s 60 Hertz, that means the display image is refreshed 60 times per second. More advanced displays would have higher values, like 100 Hertz. The refresh rate means we need to send full image 60 times or 100 times in each second. To visualize this amount of data, we need to multiply refresh rate by the resolution of the screen. For example, for a 7-inch Riverdi LVDS display with resolution 1024 by 600 it is roughly 600 thousand pixels.
The most common internal image transfer interface in industrial LCD displays nowadays is LVDS – Low Voltage Differential Signal. A crucial feature of this interface is that it is differential. It means that the signal is immune to interference and we can use a twisted pair of wires to transfer the data. We can send data fast and it will not be corrupt by any noise, interference. This kind of data corruption is quite common in other interfaces.Key Takeaway: In LVDS display interface the differential signal allows you to send the signal at a very high speed and keep it safe from noise.
The next, older image transfer interface is called RGB. Name comes from the colors sent parallelly to the display: red, green and blue. LVDS is a serial interface and the RGB is a parallel interface. The main difference is that RGB is not differential, so it is easier to disturb signal with noise and you configure the speed of this interface too high. Parallel interface means that we send every bit in a separate line. In theory this interface could be fast, but because it is not differential, the transfer speed is limited. Moreover, the RGB display interface will work with rather small screen sizes – usually up to 7-inch or 10-inch.
12 inch screen size is the total maximum for a LCD display with RGB interface, but the resolution will be lower, like 800 by 600. For this display size it is very low resolution. This is the reason why the 7-inch is size above which the LCD displays are being switched from RGB to LVDS interface. Among Riverdi products (if you go to the Riverdi website and to the IPS display tab), there are displays without the controller, and the small displays like 3.5-inch, 4.3-inch and 5-inch are equipped with RGB interface. But when you go to the 7-inch LCD displays tab on Riverdi website, you will find RGB, LVDS and MIPI displays. But when you go to the 10-inch or bigger displays, you will only find the LVDS displays because our 10-inch LCD displays are high resolution 1280 by 800, and it is impossible to build it with the RGB interface.Key Takeaway: RGB is low speed and not immune to noise. Use it for the smaller size displays or with lower resolution.
MIPI – Mobile Industry Processor Interface – is an internally embedded image transfer interface, getting popular these days. This kind of interface is used in mobile applications, tablets or mobile phones, but it is entering as an option in industrial applications. In Riverdi we offer 7-inch MIPI displays, but please be careful with other MIPI displays on the market. Many come from mobile phones or tablet market. Also, the TFT glass availability may not be stable as the mobile market changes really fast, every six months or every year. When you buy a 7-inch Riverdi MIPI interface display you are safe, because it is an industrial display.
This is why we have a limited number of displays with MIPI interface – we want to be sure that what we sale will be available for a long time. Longevity is one of Riverdi’s core values and we do not want to deliver anything that will not be supported for a minimum 3 to 5 years. It is because many of our customers are making industrial, medical or military devices and they need displays to be available long-term.Key Takeaway: MIPI is an important and growing interface in the display market.
Next interface is the Vx1. It is similar to LVDS and MIPI, so it’s low voltage differential signal. Vx1 is a very high-speed interface, usually used in large high-resolution screens, like 55-inch 4K TVs or even larger ones. If you buy this kind of a TV set right now, probably the embedded interface inside will be the Vx1.Key takeaway: Vx1 is a super-fast interface used for high bandwidth image transfer, with high refresh rate and high-resolution displays, used in 4K screens and above.
The last internal image transfer interface is Embedded DisplayPort (eDP). We call it the new LVDS, because many new industrial displays are equipped with the eDP. If you go through industrial manufacturers of TFT LCD displays, you will notice increasing number of models available with the eDP. eDP is also a native interface in new Intel or AMD based processors.Key Takeaway: With the embedded DisplayPort as a native display interface you can cut down costs, because you do not need anything extra to connect a display to the processor.
Now, with the processors on the market, we need displays with embedded DisplayPort. Many laptops or monitors already use embedded DisplayPort as an internal interface instead of LVDS. LVDS still is the most popular industrial LCD display interface. All the internal image transfer interfaces like MIPI, Vx1 and eDP are variations of LVDS, where the protocols and the signals are a little bit different. For example, for eDP we can have lower noise and reduced power consumption. All of them have advantages over regular LVDS, but they are all LVDS type.
Now, let’s take a closer look at external interfaces. Those are the ones that we usually have direct access to. It can be TV or monitor connected to your computer with the HDMI . It can be a DVI usually used for monitors. Or VGA which is an outdated image interface for monitors. The DisplayPort that is a HDMI successor. Finally, an universal USB-C, the most common interface nowadays used to connect devices.
Let us start with USB-C, the most universal interface . It is one of the best interfaces that we have ever designed, because it is really fast and also very universal. It not only transfers data, not only it is fast enough to transfer image, but it can also transmit a lot of power.
USB-C transmits up to 100 watt of power, because you can increase voltage and current. In a regular USB it is usually 5 volt and 0.5 or 1.0 amp, so only a couple watts. In USB-C you increase the voltage up to 20 volt and with the 5 amp current, so in total it’s even 100 watt of power. This interface is made not only for data, but for real power transfer. Through USB-C you can charge your phone and your laptop. If you buy a new laptop right now, you may even not get a regular power connector, but only an USB-C. The USB-C is a very smart interface. If you connect the devices, they can negotiate with each other which one has more power. For example, if we connect a charger to a laptop, the charger has more power and will charge the laptop, but if you connect the laptop with the same interface to your mobile phone, then they will discuss the power levels, and of course the laptop will be charging the phone. You can already find monitors on the market that have USB-C instead of HDMI. Those monitors can be powered from your computer and need only one USB cable, both for image transfer and power. For sure the future belongs to USB-C implementations.Key Takeaway: USB-C is a really smart, universal and fast interface for displays. It comes with power transmission option.
Let’s move on to image transfer interfaces. The most common one is HDMI – High-Definition Multimedia Interface. M stands for Multimedia, because it transfers image with sound. If you connect your computer to your TV set with HDMI, you will need one cable for both the video and the audio. There are variations of HDMI connectors:standard HDMI,
The next one is DVI – Digital Visual Interface. The first DVI was not a multimedia interface, because it did not have audio data transfer. Nowadays, there are some variations that can transfer audio, but it is non-standard. We can assume DVI is rather for image transfer. It is a digital interface, similar in signals to HDMI. The latest variation is DVI-I, where I stands for integrated interface. It can have a digital and analog part for VGA compatibility. In the picture above there is a DVI-D, digital only, where we do not have the pins for analog VGA interface. Analog VGA is sometimes available in your desktop computer, but not in laptops anymore.Key Takeaway: DVI is digital visual interface with multiple variations and updates, similar in signal to HDMI
The oldest video interface still in use is the VGA – Video Graphic Array interface. It becomes less and less popular. This is an analog interface, not a digital one like all the other abovementioned interfaces. Analog interface means that we do not transmit the bits, but we send the voltages values. The analog signals are not stable, they are quite easy to disturb, so the transfer cannot be very high in speed and volumeKey takeaway: VGA’s popularity is declining, and it is not the best solution if you have a high-resolution display or noisy environment.
The last external interface that we can find in our devices nowadays is a DisplayPort. DisplayPort is similar to HDMI or DVI. It can also transfer image and sound. It is even faster than the HDMI. Usually, the DisplayPort is used for high resolution displays, for new monitors and TVs with 4K or 8K resolution where it is really hard, or nearly impossible, to achieve such resolution using HDMI interface.Key Takeaway: DisplayPort is super-fast image and sound transmitting interface, used in highest resolution displays.
The Serial Peripheral Interface is a synchronous serial communication interface for short-distance communication, it is typically used in embedded systems. The interface was developed by Motorola in the mid 1980’s and has become a very popular standard.
It is used with many kinds of sensors, LCD’s and also SD-Cards. SPI operates in a Master-Slave model, with a possibility of multiple slave devices, each selected in turn by a SS (slave select) or CS (chip select) pin that is usually pulled low by the master.
You should also note the SPI slave devices that do not have a tri-state mode on their MISO pins, should not be used on the same bus as devices that have without using an external tri-state buffer circuit between the non-tristate device and the rest of the devices on the MISO bus.
To begin communication, the bus master configures the clock, using a frequency supported by the slave device, typically up to a few MHz. The master then selects the slave device with a logic level 0 on the select line. If a waiting period is required, such as for an analog-to-digital conversion, the master must wait for at least that period of time before issuing clock cycles.
Transmissions normally involve two shift registers of some given word-size, such as eight bits, one in the master and one in the slave; they are connected in a virtual ring topology. Data is usually shifted out with the most significant bit first. On the clock edge, both master and slave shift out a bit and output it on the transmission line to the counterpart. On the next clock edge, at each receiver the bit is sampled from the transmission line and set as a new least-significant bit of the shift register. After the register bits have been shifted out and in, the master and slave have exchanged register values. If more data needs to be exchanged, the shift registers are reloaded and the process repeats. Transmission may continue for any number of clock cycles. When complete, the master stops toggling the clock signal, and typically deselects the slave.
In addition to setting the clock frequency, the master must also configure the clock polarity and phase with respect to the data. Motorola SPI Block Guide names these two options as CPOL and CPHA (for clock polarity and phase) respectively, a convention most vendors have also adopted.
An alternative way of considering it is to say that a CPHA=0 cycle consists of a half cycle with the clock idle, followed by a half cycle with the clock asserted.
An alternative way of considering it is to say that a CPHA=1 cycle consists of a half cycle with the clock asserted, followed by a half cycle with the clock idle.
The combinations of polarity and phases are often referred to as modes which are commonly numbered according to the following convention, with CPOL as the high order bit and CPHA as the low order bit:
Note that in Full Duplex operation, the Master device could transmit and receive with different modes. For instance, it could transmit in Mode 0 and be receiving in Mode 1 at the same time.
Pull-up resistors between the power source and chip select lines are recommended for systems where the master’s chip select pins may default to an undefined state. When separate software routines initialize each chip select and communicate with its slave, pull-up resistors prevent other uninitialized slaves from responding.
Since the MISO pins of the slaves are connected together, they are required to be tri-state pins (high, low or high-impedance), where the high-impedance output must be applied when the slave is not selected. Slave devices not supporting tri-state may be used in independent slave configuration by adding a tri-state buffer chip controlled by the chip select signal. (Since only a single signal line needs to be tri-stated per slave, one typical standard logic chip that contains four tristate buffers with independent gate inputs can be used to interface up to four slave devices to an SPI bus.)
Some products that implement SPI may be connected in a daisy chain configuration, the first slave output being connected to the second slave input, etc. The SPI port of each slave is designed to send out during the second group of clock pulses an exact copy of the data it received during the first group of clock pulses. The whole chain acts as a communication shift register; daisy chaining is often done with shift registers to provide a bank of inputs or outputs through SPI. Each slave copies input to output in the next clock cycle until the active low SS line goes high. Such a feature only requires a single SS line from the master, rather than a separate SS line for each slave.
Some slave devices are designed to ignore any SPI communications in which the number of clock pulses is greater than specified. Others do not care, ignoring extra inputs and continuing to shift the same output bit. It is common for different devices to use SPI communications with different lengths, as, for example, when SPI is used to access the scan chain of a digital IC by issuing a command word of one size (perhaps 32 bits) and then getting a response of a different size (perhaps 153 bits, one for each pin in that scan chain).
Below is an example of bit-banging the SPI protocol as an SPI master with CPOL=0, CPHA=0, and eight bits per transfer. The example is written in the C programming language. Because this is CPOL=0 the clock must be pulled low before the chip select is activated. The chip select line must be activated, which normally means being toggled low, for the peripheral before the start of the transfer, and then deactivated afterwards. Most peripherals allow or require several transfers while the select line is low; this routine might be called several times before deselecting the chip.
Since it’s inception the Arduino IDE has demonstrated the desire to support all kind of platforms, from Arduino clones and variations of different manufacturers to third party boards like the ESP32 and ESp8266. As more people get familiar with the IDE, they are beginning to support more boards that are not based on ATMEL chips and for today’s tutorial we will look on one of such boards. We will examine how to program the STM32 based, STM32F103C8T6 development board with the Arduino IDE.
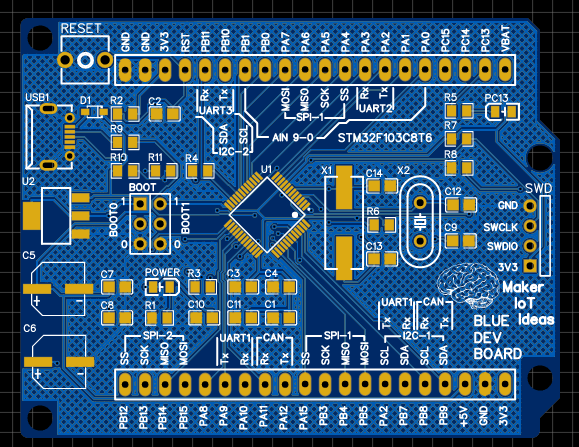
The STM32 board to be used for this tutorial is none other than the STM32F103C8T6 chip based STM32F1 development board commonly referred to as “Blue Pill” in line with the blue color of its PCB. Blue Pill is powered by the powerful 32-bit STM32F103C8T6 ARM processor, clocked at 72MHz. The board operates on 3.3v logic levels but its GPIO pins have been tested to be 5v tolerant. While it does not come with WiFi or Bluetooth like the ESP32 and Arduino variants, it offers 20KB of RAM and 64KB of flash memory which makes it adequate for large projects. It also possesses 37 GPIO pins, 10 of which can be used for Analog sensors since they have ADC enabled, along with others which are enabled for SPI, I2C, CAN, UART, and DMA. For a board which costs around $3, you will agree with me that these are impressive specs. A summarized version of these specifications compared with that of an Arduino Uno is shown in the image below.
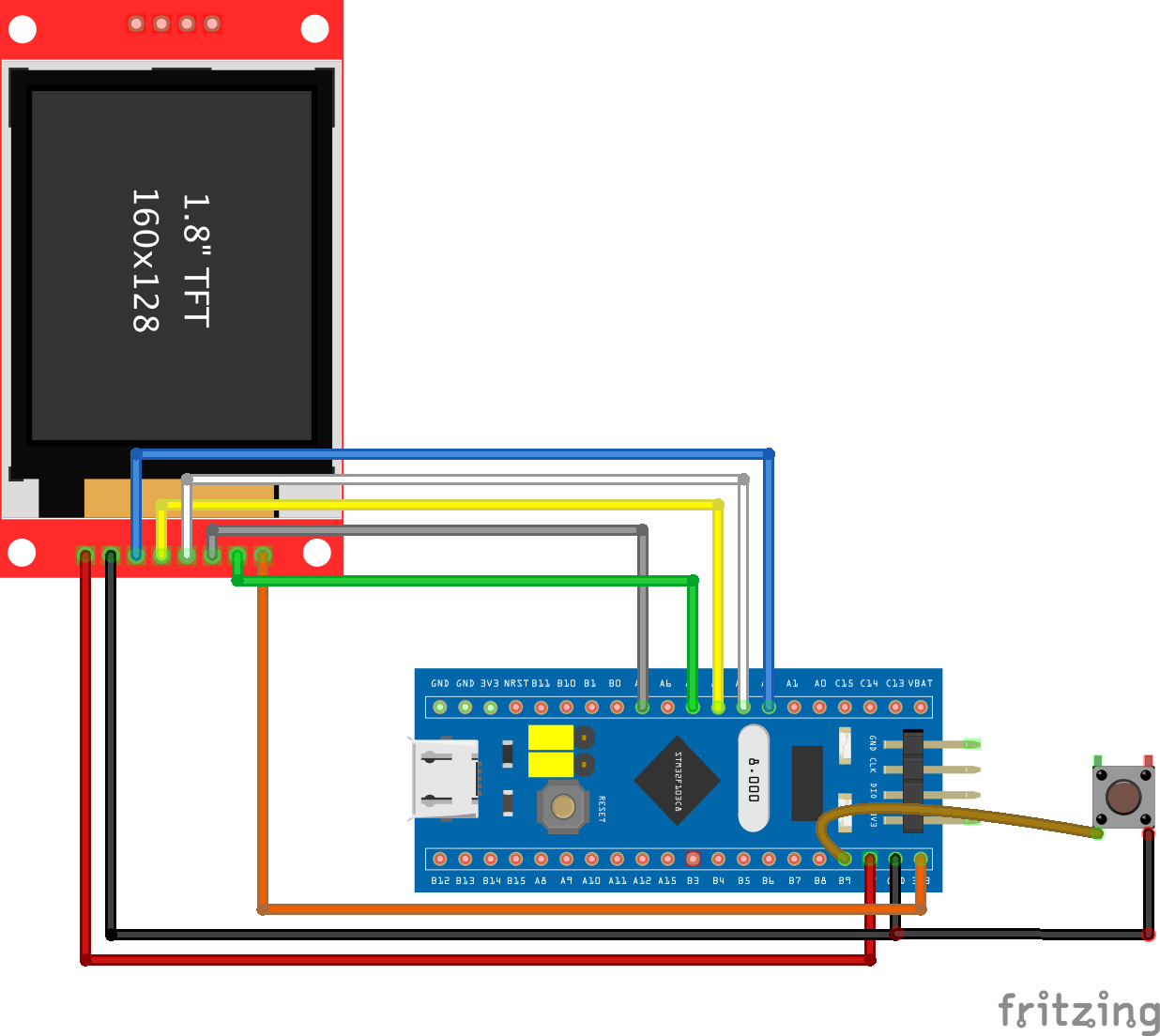
Based on the specs above, the frequency at which Blue pill operates is about 4.5 times higher than an Arduino UNO, for today’s tutorial, as an example on how to use the STM32F1 board, we will connect it to a 1.44″ TFT display and program it to calculate the “Pi” constant. We will note how long it took the board to obtain the value an compare it with the time it takes an Arduino Uno to perform the same task.
As mentioned earlier, we will connect the STM32F1 board to the1.8″ ST7735 based colored TFT Display along with a push button. The push button will be used to instruct the board to start the calculation.
Go over the connections once again to be sure everything is as it should be as it tends to get a little bit tricky. With this done, we proceed to set up the STM32 board to be programmed with the Arduino IDE.
As with most boards not made by Arduino, a bit of setup needs to be done before the board can be used with the Arduino IDE. This involves installing the board file either via the Arduino Board manager or downloading from the internet and copy the files into the hardware folder. The Board Manager route is the less tedious one and since the STM32F1 is among the listed boards, we will go that route.
Start by adding the link for the STM32 board to the Arduino preference lists. Go to File -> Preferences, then enter this URL ( http://dan.drown.org/stm32duino/package_STM32duino_index.json ) in the box as indicated below and click ok.
The code will be written the same way we’d write any other sketch for an Arduino project, with the only difference being the way the pins are referenced.
To be able to easily develop the code for this project, we will use two libraries which are both modifications of standard Arduino Libraries to make them compatible for the STM32. We will use the modified version of the Adafruit GFX and the Adafruit ST7735 libraries. Both libraries can be downloaded via the links attached to them.
With this done, we create an object of the ST7735 library which will be used to reference the display all through the entire project. We also indicate the pin of the STM32 to which the pushbutton is connected and create a variable to hold its state.
Next, we initialize serial communication and the screen, setting the background of the display to black and calling the printUI() function to display the interface.
We start by reading the state of the push button. If the button has been pressed, we remove the current message on the screen using the removePressKeyText() and draw the changing progress bar using the drawBar() function. We then call the start calculation function to obtain and display the value of Pi along with the time it took to calculate it.
The remaining part of the code are the functions called to achieve the tasks from drawing the bar to calculating the Pi. Most of these functions have been covered in several other tutorials that involve the use of the ST7735 display.
Uploading sketches to the STM32f1 is a little bit complex compared to standard Arduino compatible boards. To upload code to the board, we need an FTDI based, USB to Serial converter.
With this done, we then change the position of the board’s state jumper to position one (as shown in the gif below), so as to put the board in programming mode. Press the reset button on the board once after this and we are ready to upload the code.
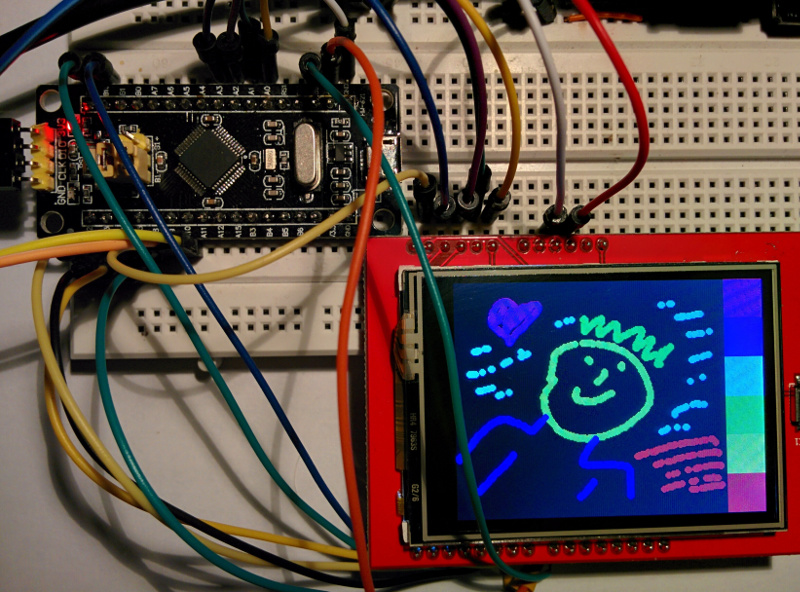
With the code complete, follow the upload process described above to upload the code to your setup. You should see the display come up as shown in the Image below.
Press the pushbutton to start the calculation. You should see the progress bar slide gradually until the end. At the end of the process, the value of Pi is displayed along with the time which the calculation took.
Comparing these two values, we see that “Blue Pill” is over 7 times faster than the Arduino Uno. This makes it ideal for projects which involves heavy processing and time constraints. The small size of the Blue pill also serves as an advantage here as it is only a bit bigger than the Arduino nano and it can be used in place where the Nano won’t be fast enough.
That’s it for today’s tutorial guys. What will you be building with the Blue Pill? feel free to share along with any questions you might have, under the comment section.

STM32 is a family of 32-bit microcontroller integrated circuits by STMicroelectronics. The STM32 chips are grouped into related series that are based around the same 32-bit ARM processor core, such as the Cortex-M33F, Cortex-M7F, Cortex-M4F, Cortex-M3, Cortex-M0+, or Cortex-M0. Internally, each microcontroller consists of the processor core, static RAM, flash memory, debugging interface, and various peripherals.
The STM32 is a family of microcontroller ICs based on the 32-bit RISC ARM Cortex-M33F, Cortex-M7F, Cortex-M4F, Cortex-M3, Cortex-M0+, and Cortex-M0 cores.STMicroelectronics licenses the ARM Processor IP from ARM Holdings. The ARM core designs have numerous configurable options, and ST chooses the individual configuration to use for each design. ST attaches its own peripherals to the core before converting the design into a silicon die. The following tables summarize the STM32 microcontroller families.
In November 2010, ST announced the STM32 F2-series chips based on the ARM Cortex-M3 core, and future development of chips based on the ARM Cortex-M4 and ARM Cortex-M3 cores.
In September 2012, ST announced full-production of STM32 F3-series chips and STM32F3DISCOVERY board. The STM32 F050-series will also be available in a TSSOP20 package.
In October 2018, ST announced the STM32L5 series, ultra-low-power MCUs based on the ARM Cortex-M33 core with a variety of security features, such as TrustZone, Secure Boot, active IO tamper detection, Secure Firmware Install loader, certified cryptolib etc.
In February 2021, ST announced the STM32U5 series, ultra-low-power MCUs based on the ARM Cortex-M33 core with a variety of low power and security features, such as TrustZone, Secure Boot, active IO tamper detection, hardware-based protection targeting PSA and SESIP assurance level 3, etc.
The STM32 family consists of 17 series of microcontrollers: H7, F7, F4, F3, F2, F1, F0, G4, G0, L5, L4, L4+ L1, L0, U5, WL, WB.Cortex-M7F, Cortex-M4F, Cortex-M33, Cortex-M3, Cortex-M0+, or Cortex-M0 ARM processor core. The Cortex-M4F is conceptually a Cortex-M3DSP and single-precision floating-point instructions.
The STM32 H7-series is a group of high performance STM32 microcontrollers based on the ARM Cortex-M7F core with double-precision floating point unit and optional second Cortex-M4F core with single-precision floating point. Cortex-M7F core can reach working frequency up to 480 MHz, while Cortex-M4F - up to 240 MHz. Each of these cores can work independently or as master/slave core.
The STM32H7 Series is the first series of STM32 microcontrollers in 40 nm process technology and the first series of ARM Cortex-M7-based microcontrollers which is able to run up to 480 MHz, allowing a performance boost versus previous series of Cortex-M microcontrollers, reaching new performance records of 1027 DMIPS and 2400 CoreMark.
The STM32 F7-series is a group of STM32 microcontrollers based on the ARM Cortex-M7F core. Many of the F7 series are pin-to-pin compatible with the STM32 F4-series.
The STM32 F4-series is the first group of STM32 microcontrollers based on the ARM Cortex-M4F core. The F4-series is also the first STM32 series to have DSP and floating-point instructions. The F4 is pin-to-pin compatible with the STM32 F2-series and adds higher clock speed, 64 KB CCM static RAM, full-duplex I²S, improved real-time clock, and faster ADCs. The summary for this series is:
Static RAM consists of up to 192 KB general-purpose, 64 KB core-coupled memory (CCM), 4 KB battery-backed, 80 bytes battery-backed with tamper-detection erase.
The STM32 F3-series is the second group of STM32 microcontrollers based on the ARM Cortex-M4F core. The F3 is almost pin-to-pin compatible with the STM32 F1-series. The summary for this series is:
Static RAM consists of 16 / 24 / 32 / 40 KB general purpose with hardware parity check, 0 / 8 KB core coupled memory (CCM) with hardware parity check, 64 / 128 bytes battery-backed with tamper-detection erase.
The distinguishing feature for this series is presence of four fast, 12-bit, simultaneous sampling ADCs (multiplexer to over 30 channels), and four matched, 8 MHz bandwidth op-amps with all pins exposed and additionally internal PGA (Programmable Gain Array) network. The exposed pads allow for a range of analog signal conditioning circuits like band-pass filters, anti-alias filters, charge amplifiers, integrators/differentiators, "instrumentation" high-gain differential inputs, and other. This eliminates need for external op-amps for many applications. The built-in two-channel DAC has arbitrary waveform as well as a hardware-generated waveform (sine, triangle, noise etc.) capability. All analog devices can be completely independent, or partially internally connected, meaning that one can have nearly everything that is needed for an advanced measurement and sensor interfacing system in a single chip.
The STM32 F2-series of STM32 microcontrollers based on the ARM Cortex-M3 core. It is the most recent and fastest Cortex-M3 series. The F2 is pin-to-pin compatible with the STM32 F4-series. The summary for this series is:
The STM32 F1-series was the first group of STM32 microcontrollers based on the ARM Cortex-M3 core and considered their mainstream ARM microcontrollers. The F1-series has evolved over time by increasing CPU speed, size of internal memory, variety of peripherals. There are five F1 lines: Connectivity (STM32F105/107), Performance (STM32F103), USB Access (STM32F102), Access (STM32F101), Value (STM32F100). The summary for this series is:
The STM32 G4-series is a next generation of Cortex-M4F microcontrollers aiming to replace F3 series, offering the golden mean in productivity and power efficiency, e.g. better power efficiency and performance compared to the older F3/F4 series and higher performance compared to ultra low power L4 series, integrated several hardware accelerators.
Static RAM sizes of 32 to 128 KB with hardware parity checking and CCM-SRAM routine booster, 32x 32-bit battery-backed registers with tamper-detection erase.
The STM32 G0-series is a next generation of Cortex-M0/M0+ microcontrollers for budget market segment, offering the golden mean in productivity and power efficiency, e.g. better power efficiency and performance compared to the older F0 series and higher performance compared to ultra low power L0 series
Static RAM sizes of 8 to 128 KB general purpose with hardware parity checking and up to 144 KB without hardware parity checking, 5x 32-bit battery-backed registers with tamper-detection erase.
The STM32 L4+-series is expansion of STM32L4-series of ultra-low power microcontrollers, providing more performance, more embedded memory and richer graphics and connectivity features while keeping ultra-low-power capability.
The STM32 L4-series is an evolution of STM32L1-series of ultra-low power microcontrollers. An example of L4 MCU is STM32L432KC in UFQFPN32 package, that has:
The STM32 L1-series was the first group of STM32 microcontrollers with a primary goal of ultra-low power usage for battery-powered applications. The summary for this series is:
Flash consists of 32 / 64 / 128 / 256 / 384 / 512 KB general purpose with ECC, 4 / 8 KB system boot, 32 option bytes, EEPROM consists of 4 / 8 / 12 / 16 KB data storage with ECC.
Common peripherals included in all IC packages are USB 2.0 FS, two SPI, two I²C, three USART, eight 16-bit timers, two watchdog timers, temperature sensor, 16 to 24 channels into one ADC, two DACs, 37 to 83 GPIOs, seven DMA, real-time clock (RTC), cyclic redundancy check (CRC) engine. The STM32FL152 line adds a LCD controller.
The STM32 L0-series is the first group of STM32 microcontrollers based on the ARM Cortex-M0+ core. This series targets low power applications. The summary for this series is:
capacitive touch sense and 32-bit random number generator (only L0x2 and L0x3 chips), LCD controller (only L0x3 chips), 128-bit AES engine (only L06x chips).
NUCLEO-G431KB board for STM32G431KB6U MCU with 170 MHz Cortex-M4F core, 128 KB flash (HW ECC), 16 KB SRAM (HW parity), 6 KB SRAM, 10 KB CCM SRAM, STLINK-V3E.
NUCLEO-L412KB board for STM32L412KBU6 MCU with 80 MHz Cortex-M4F core, 128 KB flash (HW ECC), 32 KB SRAM, 8 KB SRAM (HW parity), external quad-SPI memory interface.
NUCLEO-L432KC board for STM32L432KCU6 MCU with 80 MHz Cortex-M4F core, 256 KB flash (HW ECC), 48 KB SRAM, 16 KB SRAM (HW parity), external quad-SPI memory interface.
NUCLEO-F303RE board for STM32F303RET6 MCU with 72 MHz Cortex-M4F core, 512 KB flash, 32 KB SRAM, 48 KB SRAM (HW parity), external static memory interface.
NUCLEO-F446RE board for STM32F446RET6 MCU with 180 MHz Cortex-M4F core, 512 KB flash, 128 KB SRAM, external quad-SPI memory interface, external flexible memory interface.
NUCLEO-L433RC-P board for STM32L433RCT6P MCU with 80 MHz Cortex-M4F core, 256 KB flash (HW ECC), 48 KB SRAM, 16 KB SRAM (HW parity), external quad-SPI memory interface, SMPS power.
NUCLEO-L452RE-P board for STM32L452RET6P MCU with 80 MHz Cortex-M4F core, 512 KB flash (HW ECC), 128 KB SRAM, 32 KB SRAM (HW parity), external quad-SPI memory interface, SMPS power.
NUCLEO-L452RE board for STM32L452RET6 MCU with 80 MHz Cortex-M4F core, 512 KB flash (HW ECC), 128 KB SRAM, 32 KB SRAM (HW parity), external quad-SPI memory interface.
NUCLEO-L476RG board for STM32L476RGT6 MCU with 80 MHz Cortex-M4F core, 1024 KB flash (HW ECC), 96 KB SRAM, 32 KB SRAM (HW parity), external quad-SPI memory interface, external static memory interface.
This family has 144-pin STM32 ICs, Arduino Uno Rev3 female headers, ST Zio female headers, ST Morpho male pin headers (two 19x2), second Micro-AB USB connector, and RJ45 Ethernet connector (some boards).
NUCLEO-F207ZG board for STM32F207ZGT6 MCU with 120 MHz Cortex-M3 core, 1024 KB flash (HW ECC), 128 KB SRAM, 4 KB battery-back SRAM, external static memory interface, ethernet.
NUCLEO-F303ZE board for STM32F303ZET6 MCU with 72 MHz Cortex-M4F core, 512 KB flash (HW ECC), 32 KB SRAM, 48 KB SRAM (HW parity), external static memory interface.
NUCLEO-F412ZG board for STM32F412ZGT6 MCU with 100 MHz Cortex-M4F core, 1024 KB flash, 256 KB SRAM, external quad-SPI memory interface, external static memory interface.
NUCLEO-F429ZI board for STM32F429ZIT6 MCU with 180 MHz Cortex-M4F core, 2048 KB flash, 256 KB SRAM, 4 KB battery-back SRAM, external flexible memory interface, ethernet.
NUCLEO-F439ZI board for STM32F439ZIT6 MCU with 180 MHz Cortex-M4F core, 2048 KB flash, 256 KB SRAM, 4 KB battery-back SRAM, external flexible memory interface, ethernet, cryptographic acceleration.
NUCLEO-F446ZE board for STM32F446ZET6 MCU with 180 MHz Cortex-M4F core, 512 KB flash, 128 KB SRAM, 4 KB battery-back SRAM, external quad-SPI memory interface, external flexible memory interface.
NUCLEO-F746ZG board for STM32F746ZGT6 MCU with 216 MHz Cortex-M7F core (4 KB data cache, 4 KB instruction cache), 1024 KB flash, 336 KB SRAM, 4 KB battery-back SRAM, 1 KB OTP, external quad-SPI memory interface, external flexible memory interface, ethernet.
NUCLEO-F767ZI board for STM32F767ZIT6 MCU with 216 MHz Cortex-M7F-DP core (16 KB data cache, 16 KB instruction cache), 2048 KB flash, 528 KB SRAM, 4 KB battery-back SRAM, external quad-SPI memory interface, external flexible memory interface, ethernet.
A discovery board for STM32F429ZIT6 microcontroller with 180 MHz ARM Cortex-M4F core, 2048 KB flash, 256 KB RAM, 4 KB battery-backed RAM in LQFP144 package.
This board includes an integrated ST-LINK/V2 debugger via Mini-B USB connector, 8 MB SDRAM (IS42S16400J), 2.4-inch 320x200 TFT LCD color display (SF-TC240T), touchscreen controller (STMPE811), gyroscope (L3GD20), 2 user LEDs, user button, reset button, Full-Speed USB OTG to second Micro-AB USB connector, and two 32x2 male pin headers.
A discovery board for STM32F407VGT6 microcontroller with 168 MHz ARM Cortex-M4F core, 1024 KB flash, 192 KB RAM, 4 KB battery-backed RAM in LQFP100 package.
A discovery board for STM32L152RBT6 microcontroller with 32 MHz ARM Cortex-M3 core, 128 KB flash (with ECC), 16 KB RAM, 4 KB EEPROM (with ECC) in LQFP64 package.
This board includes an integrated ST-LINK/V2 debugger via Mini-B USB connector, 24-segment LCD, touch sensors, 2 user LEDs, user button, reset button, and two 28x1 male pin headers.
A discovery board for STM32L152RCT6 microcontroller with 32 MHz ARM Cortex-M3 core, 256 KB flash (with ECC), 32 KB RAM, 8 KB EEPROM (with ECC) in LQFP64 package.
This board includes an integrated ST-LINK/V2 debugger via Mini-B USB connector, 24-segment LCD, touch sensors, 2 user LEDs, user button, reset button, and two 28x1 male pin headers.
A discovery board for STM32L100RCT6 microcontroller with 32 MHz ARM Cortex-M3 core, 256 KB flash (with ECC), 16 KB RAM, 4 KB EEPROM (with ECC) in LQFP64 package.
The evaluation board has a built-in 2.4 GHz IEEE 802.15.4 transceiver and Lower MAC (so supports 802.15.4, ZigBee RF4CE, ZigBee Pro, 6LoWPAN (Contiki) wireless protocols). The SoC contains 128-Kbyte flash and 8-Kbyte RAM memory. Flash memory is upgradable too via USB. It has an ARM Serial Wire Debug (SWD) interface (Remote board) and is designed to be powered by USB or with 2 AAA batteries (Remote board). There are two user-defined LEDs (green and yellow) and five push buttons to create easy-to-use remote functions (remote board).
A ready-to-use Java development kits for its STM32 microcontrollers. The STM3220G-JAVA Starter Kit combines an evaluation version of IS2T"s MicroEJ® Software Development Kit (SDK) and the STM32F2 series microcontroller evaluation board providing everything engineers need to start their projects.
MicroEJ provides extended features to create, simulate, test and deploy Java applications in embedded systems. Support for Graphical User Interface (GUI) development includes a widget library, design tools including storyboarding, and tools for customizing fonts.STM32F205VGT6J.
A prototyping environment for a variety of STM32 variants, which allows users to create their applications using an application programming interface (API) to implement device peripherals and a range of evaluation features on the EvoPrimer base including TFT color touchscreen, graphical user interface, joy stick, codec-based audio, SD card, IrDA and standard peripherals such as USB, USART, SPI, I2C, CAN, etc.
The EvoPrimer base includes a device programming and application debugging interface and comes with a Raisonance software tool set for coding, compiling and debugging the user"s application.
The CircleOS utility allows the user to code their applications relying on an application programming interface, making it possible to program the application without having to master the configuration of device peripherals.
Simulink, by MathWorks provides model-based design solutions to design embedded systems. The Embedded Coder Support Package for STMicroelectronics Discovery Boards and the Simulink Coder Support Package for STMicroelectronics Nucleo Boards provide parameter tuning, signal monitoring and one-click deployment of Simulink algorithms to STM32 boards with access to peripherals like ADC, PWM, GPIOs, I²C, SPI, SCI, TCP/IP, UDP, etc.
All STM32 microcontrollers have a ROM"ed bootloader that supports loading a binary image into its flash memory using one or more peripherals (varies by STM32 family). Since all STM32 bootloaders support loading from the USART peripheral and most boards connect the USART to RS-232 or a USB-to-UART adapter IC, thus it"s a universal method to program the STM32 microcontroller. This method requires the target to have a way to enable/disable booting from the ROM"ed bootloader (i.e. jumper / switch / button).
STMicroelectronics has additional documents, such as: evaluation board user manuals, application notes, getting started guides, software library documents, errata, and more. See External Links section for links to official STM32 and ARM documents.
The Insider"s Guide To The STM32 ARM Based Microcontroller; 2nd Edition (v1.8); Trevor Martin; Hitex; 96 pages; 2009; ISBN 0-9549988-8-X. (Download) (Other Guides)
µC/TCP-IP: The Embedded Protocol Stack for the STMicroelectronics STM32F107; 1st Edition; Christian Légaré; Micrium; 824 pages; 2010; ISBN 978-0-9823375-0-9.

Arduino UNO + 2.4 TFT LCD Display Shield Touch Panel ILI9341. Arduino Uno I2C module. TFT_22_ILI9225: ILI9225 2.2" 176x220 TFT LCD shield; TFT_eSPI: TFT graphics library for Arduino processors with performance optimisation for RP2040, STM32, ESP8266 and ESP32 It has a standard ("Intel 8080") parallel interface, and works in both 8-bit and 16-bit modes.It uses the S6D0164 driver in Henning Karlsen"s UTFT library, and because of the memory requirements of same, works only with an Arduino Mega or Due. 102,447 views; 15 comments; 59 respects; Or connect with your social account: Login with TFT LCDs are the most popular color displays the displays in smartphones, tablets, and laptops are actually the TFT LCDs only. Analog pin 5 - SCL. All Arduino UNO board output pins are 5V, connecting a 5V pin to the ILI9341 TFT display may damage its controller. We will note how long it took the board to obtain the value an Connecting the Nextion display to the Arduino is very straightforward. This tutorial takes LCD 16x2 (16 columns and 2 rows) as an example. Display.bmp images on the screen. When running your Getting the LCD Address code in arduino uno, the program says that the lcd is in address 0x3C, but I have it running in address 0x27. This ILI3941 display works well with Teensy 4.0 and 4.1, using the standard connections shown in the table. Here I am going to connect the LCD in parallel way. Interfacing the 2.4 TFT display with Arduino. We will use the digital pin 6 to control the contrast value of the LCD. Analog Pin 4 - SDA. To connect the Arduino to the display module, I used voltage divider for each line which means there are 5 voltage dividers. Please ensure the correct port. WebCharacter LCD Displays are a very commonly used for Arduino projects, to display small amounts of textual information. 6) In the Arduino IDE go to File > Examples > TFT > Arduino > TFTBitmaLogo. Both the display and the SD card work with SPI communication, so youll have pins on the Arduino with two connections. All Arduino UNO board output pins are 5V, connecting a 5V pin to the ILI9341 TFT display may damage its controller. You may observe that the graphics move slowly and this is because the processing power of 8 bit Arduino uno is only 2Kb of RAM which is low for driving a display with high resolution. It has an SD card slot on its back In this road test I apply different tutorials to check the performance and issues of this specific shield: AZ-Delivery 2.4 inch TFT LCD display with resistive 4-wire touchscreen and an integrated SD card reader. In the esp32 The LCD receives the proper 5V. The other LCDs are similar. // #define TFT_RST 4 // Reset pin (could connect to RST pin) // #define TFT_RST -1 // Set TFT_RST to -1 if display RESET is connected to ESP32 board RST // For ESP32 Dev board (only tested with GC9A01 display) // The hardware SPI can be mapped to any pins // #define TFT_MOSI 15 // In some display driver board, it might be written as WebThe screen"s pin layout is designed to easily fit into the socket of an Arduino Esplora and Arduino Robot, but it can be used with any Arduino board. Library. We can also interface this LCD with only just 4 wires. What do you need? All Arduino UNO board output pins are 5V, connecting a 5V pin to the ST7789 TFT display may damage its controller. Connect the pin 7 (LED Pin) to the middle pin of 1k potentiometer through 330 ohm resistor and connect the other two pins to the VCC and the ground. All Arduino UNO board output pins are 5V, connecting a 5V pin to the ILI9341 TFT display may damage its controller. Arduino Uno I2C module. These pins are labeled at the back of your display, as shown in the figure below. Here I am going to connect the LCD in parallel way. From basic commands to professional designs and technics are all explained here. As a controller it has an Arduino UNO board, combined with a CNC shield and four A4988 stepper drivers. WebTFT Touch Shield v2.0: Arduino library to control 2.8 inch TFT Touch Shield v2.0. On by default but you can connect the transistor to a digital pin for backlight control 5V - Vcc. To adjust the output voltage, connect the battery first to the input of the MT3608 Module and then rotate the And then read the analog value using the inbuilt ADC of Arduino Uno. It does not work, but this hardware modification may be able to get it working. On by default but you can connect the transistor to a digital pin for backlight control Display.bmp images on the screen. Interfacing a 2.8 inch SPI TFT that has a ILI9341 chip to an Arduino Uno. In this project, we will only be using an LCD, Arduino Uno, jumper wires to display text on the LCD. Now, you are ready to start experimenting with the Nextion display with Arduino UNO. You may observe that the graphics move slowly and this is because the processing power of 8 bit Arduino uno is only 2Kb of RAM which is low for driving a display with high resolution. Its quiet easy to interface Arduino and 7 Segment display together! - Now lets connect the 128x64 display. Hello everyone to my new tutorial in which we are going to program arduino for tft lcd shield of 3.5" with ILI9486 driver, 8 bit. LED - 3.3v SCK - D13 SDA - D11 DC - D9 Reset - D8 CS - D10 GND - GND VCC - 5v Double check the connection to be sure everything is as it should be. 6) In the Arduino IDE go to File > Examples > TFT > Arduino > TFTBitmaLogo. 4.3.setup.h setup.h // USER DEFINED SETTINGS // Set driver type, fonts to be loaded, pins used and SPI control method etc // // See the User_Setup_Select.h file if you wish to be able to define multiple // setups and then easily select which setup file is used by the compiler. 5V - Vcc. In the esp32 The LCD receives the proper 5V. Adafruit Industries, Unique & fun DIY electronics and kits : Arduino - Tools Gift Certificates Arduino Cables Sensors LEDs Books Breakout Boards Power EL Wire/Tape/Panel Components & Parts LCDs & Displays Wearables Prototyping Raspberry Pi Wireless Young Engineers 3D printing NeoPixels Kits & Projects Robotics & CNC Accessories Cosplay/Costuming Halloween Reseller WebWorks with any classic Arduino "328. It should not be used with 5V boards like Teensy 2.0 and Arduino Uno. In this road test I apply different tutorials to check the performance and issues of this specific shield: AZ-Delivery 2.4 inch TFT LCD display with resistive 4-wire Blue - Transmit data from the display to the Arduino, connect to RX on the Arduino Yellow - Receive data from the Arduino to the display. Note, Arduinios use one serial port for communication with your PC, do not use this serial port for connection to your Nextion display, use a spare one. I can put my I2C LCD to work in an arduino uno. BUT!! Each voltage divider consists of 2.2k and 3.3k resistors, this drops the 5V into 3V which is sufficient. I used a solderless breadboard. It does not work, but this hardware modification may be able to get it working. The I2C version is more expensive but needs only 4 wires to connect to Arduino, which makes it very attractive and an easy-to-use option for Arduino projects. These pins are labeled at the back of your display, as shown in the figure below. There are many tutorials on Arduino shields for 2.4 inch TFT LCD displays. To connect the Arduino to the display module, I used voltage divider for each line which means there are 4 voltage In this article, you will learn how to use TFT LCDs by Arduino boards. WebInterfacing the 2.4 TFT display with Arduino. Character LCD Displays are a very commonly used for Arduino projects, to display small amounts of textual information. The screen"s pin layout is designed to easily fit into the socket of an Arduino Esplora and Arduino Robot, but it can be used with any Arduino board. You just need to make four connections: GND, RX, TX, and +5V. 7) Edit the code, so that it searches for your image.Replace the arduino.bmp with the name of your image: // now that the SD card can be access, try to load the image file It has an SD card slot on its back The other LCDs are similar. The Arduino TFT library extends the Adafruit GFX, and Adafruit ST7735 libraries that it is based on. We can use the code as is without any modifications. Next open Serial monitor from the icon on top right corner of Arduino IDE. Connect the pin 5 (CLK Pin) to the pin 3 of Arduino through the 10K resistor. We do not recommend using the SD card socket on this display. The Adafruit Anemometer works between 7-24V DC.So the voltage from the Arduino is not enough to power on the sensor. Arduino UNO + 2.4 TFT LCD Display Shield Touch Panel ILI9341. TFT_22_ILI9225: ILI9225 2.2" 176x220 TFT LCD shield; TFT_eSPI: TFT graphics library for Arduino processors with performance optimisation for RP2040, STM32, ESP8266 and Character LCD Displays are a very commonly used for Arduino projects, to display small amounts of textual information. Blue - Transmit data from the display to the Arduino, connect to RX on the Arduino Yellow - Receive data from the Arduino to the display. To connect the Arduino to the display module, I used voltage divider for each line which means there are 5 voltage dividers. Many use the adruino webserver to control lights, but why not do it through a TFT to chose the various patterns and effects? Connect the pin 8 (GND Pin) to the GND of Arduino. WebIn this Arduino LCD tutorial, we will learn how to connect an LCD (Liquid Crystal Display) to the Arduino board. The TFT library is included with Arduino IDE 1.0.5 or later. The I2C version is more expensive but needs only 4 wires to connect to Arduino, which makes it very attractive and an easy-to-use option for Arduino projects. More digits are displayed by multiplexing single unit 7 segment displays together to form 2 digit display, 3 digit display or 4 digit 7 segment display. There are many types of LCD. It has 4 DOF, driven by four NEMA 17 stepper motors. There are many types of LCD. But cannot have it running in my esp32 devkit v1 (following your instructions). Interfacing a 2.8 inch SPI TFT that has a ILI9341 chip to an Arduino Uno. 128x32 uses 0x3C address so this bit looks all good here, lets double check the header library, yes its also using the 0x3C address andthe display type is 128x32. - Now lets connect the 128x64 display. Now, you are ready to start experimenting with the Nextion display with Arduino UNO. We do not recommend using the SD card socket on this display. Next open Serial monitor from the icon on top right corner of Arduino IDE. I found it important to write this tutorial as if we see we find tutorial for 1.44, 1.8, 2.0, 2.4, 2.8 inch shields however there are no or less tutorials available for 3.5" shield as its completely different from other smaller tft lcd shields - The most common types are the basic directly connected displays, and the ones with I2C adapter. Connect the Arduino to computer. The display is a 2.8" colour TFT LCD screen with a ILI9341 controller, 320x240 pixels. Each voltage divider consists of 2.2k and 3.3k resistors, this drops the 5V into 3V which is sufficient. Based on the specs above, the frequency at which Blue pill operates is about 4.5 times higher than an Arduino UNO, for todays tutorial, as an example on how to use the STM32F1 board, we will connect it to a 1.44 TFT display and program it to calculate the Pi constant. Note, Arduinios use one serial port for communication with your PC, do not use this serial port for connection to your Nextion display, use a spare one. It does not work, but this hardware modification may be able to get it working. The other LCDs are similar. There are many types of LCD. Connect the Arduino to computer. WebIn this article, you will learn how to use TFT LCDs by Arduino boards. This will be a practical, simple arduino project. Its quiet easy to interface Arduino and 7 Segment display together! Arduino Mega 2256, 5 TFT display, Ver 1.2 Megashield, Arduino IDE 1.6.7. The function to display text on the LCD will be without a potentiometer & Resistor. We can also interface this LCD with only just 4 wires. Please ensure the correct port. Works with any classic Arduino "328. Now, you are ready to start experimenting with the Nextion display with Arduino UNO. Based on the specs above, the frequency at which Blue pill operates is about 4.5 times higher than an Arduino UNO, for todays tutorial, as an example on how to use the STM32F1 board, we will connect it to a 1.44 TFT display and program it to calculate the Pi constant. This will be a practical, simple arduino project. 4.3.setup.h setup.h // USER DEFINED SETTINGS // Set driver type, fonts to be loaded, pins used and SPI control method etc // // See the User_Setup_Select.h file if you wish to be able to define multiple // setups and then easily select which setup file is used by the compiler. AUTO BOTIX 2.4 Inch Touchscreen TFT LCD Display Screen Shield Module for iduino Uno R3 Board and Support Mega 2560 320X240 Pixels Resolution -2.4 Inch Touchscreen TFT LCD Display Screen Connect with Us. For todays tutorial, we will look on how to use the relatively big, low cost, ILI9481 based, 3.5 Color TFT display with Arduino. What do you need? To connect the Arduino to the display module, I used voltage divider for each line which mea



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey