
esp32 with camera and tft display ov7670 fifo free sample

Previously I was unable to capture 320x240x2-byte frames due to memory limitations on the ESP32. But the LCD has its own frame-buffer memory sufficient for this task.
So when we take a snapshot, we detach the camera from the data bus and allow the ESP32 to read back the image data from the LCD framebuffer in useful sized chunks.
The ESP32 can then send the data chunk-by-chunk to a host PC over a serial interface, or perhaps store a file in the SPIFFS file system, or on a Micro SD card.
Because the eight camera data lines no longer come into the ESP32, I free up enough GPIO pins for some extra control signals, reading the touch screen, and having a second serial port to transmit the image to a host PC.
The "common bus" shared between three devices - the camera, the ESP32, and the LCD, requires that we are able to detach the camera data or the ESP32 data from the bus. So the ESP32 takes on the role of bus controller.
To achieve this I added two common ICs to the design: a 74LS244N bus line driver sits between the camera data lines and the LCD bus lines. It allows me to tri-state the 8 camera data lines (put the output pins into high impedance so that the ESP32 / LCD can use the bus without interference).
The 74LS244N driver only has 8 lines, I needed a 9th one for the pixel clock (PCLK). When the camera data is flowing onto the bus, we need its pixel clock (PCLK) to also be routed to the LCD_WR clock line on the LCD. But when the ESP32 is using the shared bus, it needs control of the LCD_WR line. I implemented a 2-input A/B multiplexor to route either PCLK or a GPIO line to LCD_WR using a single 74LS00N chip. The 74LS00N contains four 2-input NAND gates, enough logic to build a multiplexor for 2 inputs.
In addition, I used a 74LS244N bus driver IC and a 74LS00N quad NAND gate IC that I happened to have available. This bus driver is now obsolete, but there are plenty of newer 74LS244x replacements that should do the job as well or better.
The camera data flows through the bus driver onto shared wires that also connect to the LCD and the ESP32. The bus driver has two enable lines - each controls 4 bus output lines. Here I tied the two enable lines together so that a single GPIO pin from the ESP32 can allow the camera data through, or block the data by tri-stating the output lines.
In software, by toggling this tri-state control GPIO line, we allocate the bus to either allow Camera->LCD communication, or LCD<-->ESP32 communication.
When we give the bus to the camera, we also tri-state the ESP32 GPIOs (in fact, making them INPUT is good enough) so that the camera and ESP32 devices do
The VGA timing specs from the camera datasheet (QVGA and QQVGA are subsampled from this timing) have what I call a CountDown interval - the time between the rising edge of VSYNC and the rising edge of the first HREF on the first scan line) of 20 line times. At 25 fps VGA the CountDown interval is 1568 microseconds - and a bit longer for QVGA, which is what we use.
this time that our main loop can take the bus away from the camera and can overlay our own pixels onto the existing image, or set up the destination area for the next data to the LCD, look for touch events, etc.
We also set a camera register that allows us to blank PCLK when no pixel data is present: our LCD doesn"t understand the camera synchronization, and any free-running or spurious clock pulses would cause it to latch invalid data from the bus. This frees us from strict at-the-exact-PCLK timing constraints - it doesn"t matter if we detach or attach the camera onto the bus at any time during CountDown.

I do not move the scanlines out of the DMA buffer. I consume the data in real time and free up the DMA buffer before it is needed again. There are two DMA buffers used alternately. So while the I2S hardware is filling one, we need to be emptying the other one.
So I keep the camera and the I2S capture engine running continuously. After each VSYNC I immediately stop and restart the I2S engine. More about that in a moment.
After each VSYNC I can momentarily stop and restart the I2S engine, but quickly enough so that I know the next scanline will be the first of the next frame.
I do this in case we do lose scanlines or pixels somehow. (I tested this by momentarily grounding the PCLK signal from the camera to confuse the I2S engine. Of course I get bad-looking frames, but once I remove
32-bit "set-these-bits-mask" with three one-bits in the correct places. Direct port writes allow us to also use a mask to clear all 8 data lines at once.
I CAN WALK AGAIN! yaaay.. Back in the lab making videos.This video is the first of a miniseries showing how to interface a camera to a microcontroller (ESP32...
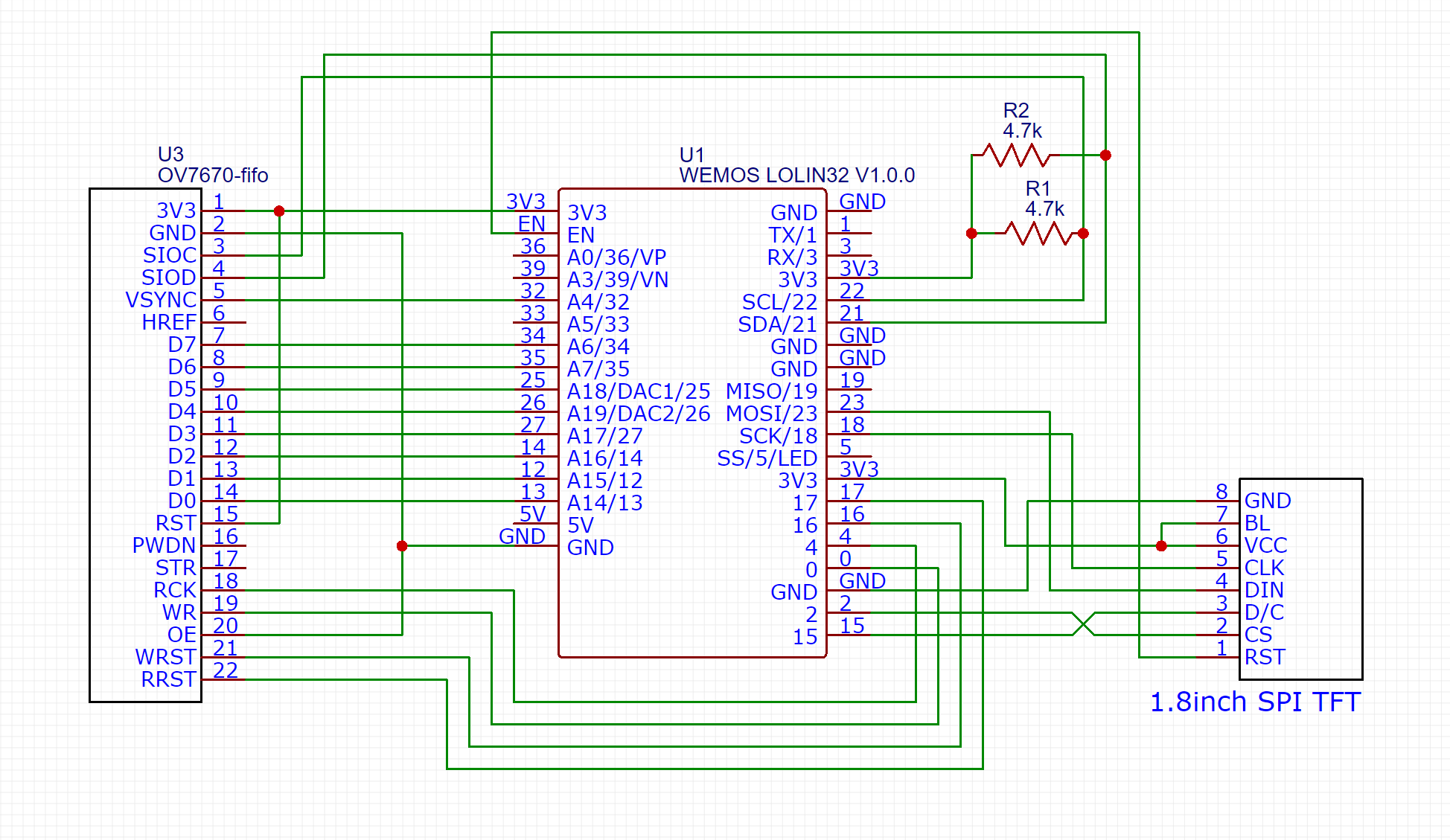
The parts used here are the LOLIN32 microcontroller. Any ESP32 board can be used. The code is currently independent of the actual processor, so you can use also different platforms.
The camera is the cheap OV7670 with FIFO (AL422b). The camera supports up to VGA resolution but the FIFO can only store 3MBit. This is just sufficient for QQVGA or section of higher resolutions.
The “real-time” output is done on the 1.8″ SPI TFT display. Due to the single data line, the update rate is really limited. To be able to run the display on 3.3V the jumper on the back side must be closed.
The pin connections of the devices can also be found in the code. The definitions can be changed except for MOSI and SCK for the SPI interface which is native on these pins on the ESP32. Using other microcontrollers, the corresponding native SPI pins have to be used.
There are some limitations configuring the pins of the ESP32. Pins 34, 35, 36(VP), 39(VN) are read-only. Those can’t be used for I2C, the clock (XCLK) or TFT signals. Pins 0, 2 and 5 are used as boot signals. Those should not be used as inputs to avoid problems while programming. Pin 5 is also attached to the LED on the LOLIN32 board. Pins 6-11 (if available) are a no go since those are wired to the SPI flash memory connected to the ESP32.
[{"id":"9ecc75dd.22e2e8","type":"mqtt in","z":"5a254896.947618","name":"","topic":"home/camera1","qos":"1","broker":"171132c7.ece67d","x":168.8333282470703,"y":222.0666732788086,"wires":[["784e5a67.89db04"]]},{"id":"6bd0fd9c.4f3c14","type":"ui_template","z":"5a254896.947618","group":"d960fd60.7c918","name":"","order":0,"width":"6","height":"5","format":"","storeOutMessages":true,"fwdInMessages":true,"templateScope":"local","x":612.83349609375,"y":222.0667266845703,"wires":[[]]},{"id":"784e5a67.89db04","type":"function","z":"5a254896.947618","name":"camera iframe","func":"msg.template = \"<iframe frameborder="0" width="100%" height="100%" src="http://\" + msg.payload + \""></iframe>\";\nreturn msg;","outputs":1,"noerr":0,"x":408.83337783813477,"y":222.20002460479736,"wires":[["6bd0fd9c.4f3c14"]]},{"id":"171132c7.ece67d","type":"mqtt-broker","z":"","broker":"localhost","port":"1883","clientid":"","usetls":false,"compatmode":true,"keepalive":"60","cleansession":true,"willTopic":"","willQos":"0","willPayload":"","birthTopic":"","birthQos":"0","birthPayload":""},{"id":"d960fd60.7c918","type":"ui_group","z":"","name":"Camera","tab":"e694697d.4bec28","order":1,"disp":false,"width":"6"},{"id":"e694697d.4bec28","type":"ui_tab","z":"","name":"Camera","icon":"dashboard","order":5}]

This project shows how to record images with the ESP32 and the OV7670 camera without FIFO. An SPI TFT display is supported and a basic web server provides the images in the local network.
To get more details about the camera registers and timings please check out the project using the FIFO version and the complete playlist on this series.
The camera is the cheap OV7670 without the FIFO. The camera supports up to VGA resolution. However, we are not able to fit a whole VGA frame into the memory of the microcontroller.
The “real-time” output is done on the 1.8″ SPI TFT display. Due to the single data line, the update rate is really limited. To be able to run the display on 3.3V the jumper on the back side must be closed.
The pin connections of the devices can also be found in the code. The definitions can be changed except for MOSI and SCK for the SPI interface which is native on these pins on the ESP32.
But there are some limitations. Pins 34, 35, 36(VP), 39(VN) are read-only. Those can’t be used for I2C, the clock (XCLK) or TFT signals. Pins 0, 2 and 5 are used as boot signals. Those should not be used as inputs to avoid problems while programming. Pin 5 is also attached to the LED on the LOLIN32 board. Pins 6-11 (if available) are a no go since those are wired to the SPI flash memory connected to the ESP32.

Hello! Today"s article is a continuation of the previousarticle. Earlier, I started talking about a unique TFT shield for the Arduino platform. Today, I would like to demonstrate the new features of this shield: I connected the regular camera OV7670 (without FIFO) to the TFT shield and are viewing live video from the camera on the TFT screen. Demo videohere. To be continued.
Hello again! There is an updated library for a series of screens, which currently consists of two shields and two breakout boards. The sketch is compiled depending on the selected version (from 1 to 4) and the type of microcontroller (MegaAVR or ESP-32). Added photos, examples. More information can be found in the.

"Upper layer" main development board contains ESP32-PICO-D4 SiP, battery connector & charger circuit with LiPo charge status LEDs, Reset & pull-up IO0 buttons, and a green LED on GPIO4.
Clone of the SparkFun ESP32 Thing board. Compact ESP32 based development board with battery connector, and the typical development board component accoutrements.
Version 2.0 of this board (1) corrected polarity labeling on bottom silk-screened battery symbol and (2) changed the LiPo battery connecter direction.
Development board/module with ESP-WROOM-32 module, USB-to-UART, Reset & Boot (IO0) buttons, Li-ion battery connector & charger, two Grove connectors, LED on IO2, and three indicator LEDs.
The ESP32-LyraTD-MSC Audio-Mic HDK (hardware development kit) combines the ESP32-LyraTD-MSC ("audio-mic development board") with a secondary "top" board.
The ESP32 touch sensor development kit, ESP32-Sense Kit, is used for evaluating and developing ESP32 touch sensor system. ESP32-Sense Kit consists of one motherboard and multiple daughterboards. The motherboard contains a display unit, a main control unit and a debug unit. The daughterboards have touch electrodes in different combinations or shapes, such as linear slider, wheel slider, matrix buttons and spring buttons, depending on the application scenarios. Users can design and add their own daughterboards for special usage cases.
Features an xBee socket with switchable VCC voltage (3.3 V or 5 V), so 2G (SIM800) and 3G (SIM5360) xBee modules will work on it to provide cellular network access.
ESP-WROOM-32 based development board with SH1106 OLED display (128×64 pixels), RJ-45 Ethernet connector, CAN-bus connector, Micro USB connector, USB-to-UART bridge, LiPo battery connector and charging circuit.
Board with MEMS Microphone (ICS-43434) and class-D amplifier embedded 1-channel DAC (Maxim MAX98357A); intended for Amazon Alexa experimentation and development.
ESP32 development board with ePaper display, TI PCM5102A DAC, ICS43434 MEMS Microphone, CP2102N USB-to-UART bridge, microSD card slot, and LiPo charger.
Circular board with ESP-WROOM-32 module, Ethernet (LAN8720A), stereo audio CODEC (WM8978), microphone, 3.5 mm audio receptacle, USB-to-UART bridge (CP2104), Micro USB connector, and SD card slot.
Has column-similar/redundant dual-row connections along the longest sides for easier stand-alone use without a breadboard (but still could be used with a breadboard).
2× Ethernet (optional), 1× Serial Port RS-232/485, OLED 0.96″ 128×64 (optional), power supply with UPS (optional), U.FL (I-PEX) antenna mount(s), and ExCard extension modules support.
SPI0 is permanently reserved for cache access to the flash chip. SPI1 is connected to the same pins via an arbiter and is used to write to flash. You can use SPI1 to also write to other peripherals connected in parallel with the flash (but with another /CS), however, this is tricky to implement because it means you can"t simultaneously access flash anymore. Thats why it"s not in the driver yet.

This library enables you to use ISR-based PWM channels on AVR ATmega164, ATmega324, ATmega644, ATmega1284 with MCUdude MightyCore, to create and output PWM any GPIO pin
This library enables you to use Hardware-based PWM channels on Arduino AVR ATtiny-based boards (ATtiny3217, etc.), using megaTinyCore, to create and output PWM to pins.
This library enables you to use ISR-based PWM channels on Arduino AVR ATtiny-based boards (ATtiny3217, etc.), using megaTinyCore, to create and output PWM any GPIO pin.
Small low-level classes and functions for Arduino: incrementMod(), decToBcd(). strcmp_PP(), PrintStr, PrintStrN, printPad{N}To(), printIntAsFloat(), TimingStats, formUrlEncode(), FCString, KString, hashDjb2(), binarySearch(), linearSearch(), isSorted(), reverse(), and so on.
Cyclic Redundancy Check (CRC) algorithms (crc8, crc16ccitt, crc32) programmatically converted from C99 code generated by pycrc (https://pycrc.org) to Arduino C++ using namespaces and PROGMEM flash memory.
Write decimal numbers, hex numbers, temperature, clock digits, characters, and strings to the seven segment LED modules supported by the AceSegment library.
Date, time, timezone classes for Arduino supporting the full IANA TZ Database to convert epoch seconds to date and time components in different time zones.
Useful Arduino utilities which are too small as separate libraries, but complex enough to be shared among multiple projects, and often have external dependencies to other libraries.
Fast and compact software I2C implementations (SimpleWireInterface, SimpleWireFastInterface) on Arduino platforms. Also provides adapter classes to allow the use of third party I2C libraries using the same API.
Enables Bluetooth® Low Energy connectivity on the Arduino MKR WiFi 1010, Arduino UNO WiFi Rev.2, Arduino Nano 33 IoT, Arduino Nano 33 BLE and Nicla Sense ME.
ESP32 + LwIP ENC28J60, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
ESP32 + LwIP W5500 / ENC28J60, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
ESP32 + LwIP W5500, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
(ESP8266 + LwIP W5500 / W5100(S) / ENC28J60) Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP library for ESP32/S2/S3/C3, WT32_ETH01 (ESP32 + LAN8720), ESP32 using LwIP ENC28J60, W5500, W6100 or LAN8720.
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP libraries, such as AsyncTCP, ESPAsyncTCP, AsyncTCP_STM32, etc.. for ESP32 (including ESP32_S2, ESP32_S3 and ESP32_C3), WT32_ETH01 (ESP32 + LAN8720), ESP32 with LwIP ENC28J60, W5500 or W6100, ESP8266 (WiFi, W5x00 or ENC28J60) and currently STM32 with LAN8720 or built-in LAN8742A Ethernet.
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP_RP2040W library for RASPBERRY_PI_PICO_W with CYW43439 WiFi.
Simple Async HTTPS Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP_SSL library for ESP32/S2/S3/C3, WT32_ETH01 (ESP32 + LAN8720), ESP32 using LwIP ENC28J60, W5500, W6100 or LAN8720.
Simple Async HTTPS Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP_SSL library for ESP32 (including ESP32_S2, ESP32_S3 and ESP32_C3), WT32_ETH01 (ESP32 + LAN8720) and ESP32 with LwIP ENC28J60, W5500 or W6100.
Fully Asynchronous UDP Library for ESP8266 using W5x00 or ENC28J60 Ethernet. The library is easy to use and includes support for Unicast, Broadcast and Multicast environments.
Fully Asynchronous UDP Library for RASPBERRY_PI_PICO_W using CYW43439 WiFi with arduino-pico core. The library is easy to use and includes support for Unicast, Broadcast and Multicast environments.
Fully Asynchronous UDP Library for Teensy 4.1 using QNEthernet. The library is easy to use and includes support for Unicast, Broadcast and Multicast environments.
ESP32 + LwIP LAN8720, including WT32-S1, ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
This library provides a low-level facility for context switching between multiple threads of execution and contains an implementation of asymmetric stackful coroutines on an AVR micro-controller.
The last hope for the desperate AVR programmer. A small (344 bytes) Arduino library to have real program traces and to find the place where your program hangs.
This library enables you to use Hardware-based PWM channels on AVR-based boards, such as Nano, UNO, Mega, Leonardo, 32u4, etc., to create and output PWM.
This library enables you to use ISR-based PWM channels on AVR-based boards, such as Mega-2560, UNO,Nano, Leonardo, etc., to create and output PWM any GPIO pin.
Enable inclusion of both ESP32 Blynk BT/BLE and WiFi libraries. Then select one at reboot or run both. Eliminate hardcoding your Wifi and Blynk credentials and configuration data saved in either LittleFS, SPIFFS or EEPROM.
Simple Ethernet Manager for MultiBlynk for Teensy, SAM DUE, SAMD21, SAMD51, nRF52, ESP32, ESP8266, RP2040-based (Nano_RP2040_Connect, RASPBERRY_PI_PICO) boards, etc. with or without SSL, configuration data saved in ESP8266/ESP32 LittleFS, SPIFFS, nRF52/RP2040 LittleFS/InternalFS, EEPROM, DueFlashStorage or SAMD FlashStorage.
Simple Blynk Credentials Manager for STM32 boards using built-in LAN8742A Ethernet, LAN8720, ENC28J60 or W5x00 Ethernet shields, with or without SSL, configuration data saved in EEPROM.
Simple GSM shield Credentials Manager for Blynk and ESP32 / ESP8266 boards, with or without SSL, configuration data saved in LittleFS / SPIFFS / EEPROM.
Simple WiFiManager for Blynk and ESP32 with or without SSL, configuration data saved in either SPIFFS or EEPROM. Enable inclusion of both ESP32 Blynk BT/BLE and WiFi libraries. Then select one at reboot or run both. Eliminate hardcoding your Wifi and Blynk credentials and configuration data saved in either LittleFS, SPIFFS or EEPROM. Using AsyncWebServer instead of WebServer, with WiFi networks scanning for selection in Configuration Portal.
Simple GSM shield Credentials Manager for Blynk and ESP32 / ESP8266 boards, with or without SSL, configuration data saved in LittleFS / SPIFFS / EEPROM.
Simple Async WiFiManager for Blynk and ESP32 (including ESP32-S2, ESP32-C3), ESP8266 with or without SSL, configuration data saved in either LittleFS, SPIFFS or EEPROM. Now working with new ESP8266 core v3.0.1 and ESP32 core v1.0.6
Simple WiFiManager for Blynk with MultiWiFi Credentials, for Mega, SAM DUE, SAMD21, SAMD51, nRF52, STM32F/L/H/G/WB/MP1, Teensy, RP2040-based RASPBERRY_PI_PICO, etc. boards running ESP8266/ESP32-AT shields. Configuration data saved in EEPROM, EEPROM-emulated FlashStorage_STM32 or FlashStorage_SAMD, SAM-DUE DueFlashStorage or nRF52/TP2040 LittleFS.
Simple WiFiManager for Blynk and ESP32 (including ESP32-S2, ESP32-C3), ESP8266 with or without SSL, configuration data saved in either LittleFS, SPIFFS or EEPROM. Now working with new ESP8266 core v3.0.0 and ESP32 core v1.0.6
Simple WiFiManager for Blynk and Mega, UNO WiFi Rev2, Teensy, SAM DUE, SAMD21, SAMD51, STM32, nRF52, RP2040-based boards, etc. using WiFiNINA shields, configuration data saved in EEPROM, FlashStorage_SAMD, FlashStorage_STM32, DueFlashStorage, nRF52/RP2040 LittleFS
An Arduino library that takes input in degrees and output a string or integer for the 4, 8, 16, or 32 compass headings (like North, South, East, and West).
CRMui3 WebFramework build a web app (Web UI) for ESP8266 and ESP32 in your project in minutes! / CRMui3 WebFramework для esp8266 и esp32. Позволяет быстро и просто создать веб интерфейс для настройки и управления устройством.
DDNS Update Client Library for SAM DUE, nRF52, SAMD21/SAMD51, STM32F/L/H/G/WB/MP1, AVR Mega, megaAVR, Teensy, RP2040-based RASPBERRY_PI_PICO, WT32_ETH01, Portenta_H7, etc. besides ESP8266/ESP32, using ESP8266-AT/ESP32-AT WiFi, WiFiNINA, Ethernet W5x00, ENC28J60, LAN8742A or Teensy NativeEthernet
AS7341 is a 11 channel visible light sensor, which can measure 8 wavelengths of visible light, suitable for color detection, light color temperature detection and other scenes(SKU:SEN0365)
This Bluetooth module features Bluetooth/U-disk/TF-card playback, and Bluetooth call function, supporting simple and clear serial port control function, BLE pass-through, and SPP pass-through functions(SKU:DFR0781)
Library to detect a double reset, using EEPROM, DueFlashStorage, FlashStorage_SAMD, FlashStorage_RTL8720, FlashStorage_STM32 or LittleFS/InternalFS. For AVR, Teensy, SAM DUE, SAMD, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, RTL8720DN, MBED nRF52840-based Nano_33_BLE, Portenta_H7, etc. boards. Now using efficient FlashStorage_STM32 library and supporting new RP2040-based Nano_RP2040_Connect, Portenta_H7, RASPBERRY_PI_PICO and STM32 core v2.0.0
Directly interface Arduino, esp8266, and esp32 to DSC PowerSeries and Classic security systems for integration with home automation, remote control apps, notifications on alarm events, and emulating DSC panels to connect DSC keypads.
This library enables you to use Hardware-based PWM channels on Arduino AVRDx-based boards (AVR128Dx, AVR64Dx, AVR32Dx, etc.), using DxCore, to create and output PWM.
This library enables you to use ISR-based PWM channels on Arduino AVRDx-based boards (AVR128Dx, AVR64Dx, AVR32Dx, etc.), using DxCore, to create and output PWM any GPIO pin.
Small and easy to use Arduino library for using push buttons at INT0/pin2 and / or any PinChangeInterrupt pin.Functions for long and double press detection are included.Just connect buttons between ground and any pin of your Arduino - that"s itNo call of begin() or polling function like update() required. No blocking debouncing delay.
Arduino library for controlling standard LEDs in an easy way. EasyLed provides simple logical methods like led.on(), led.toggle(), led.flash(), led.isOff() and more.
OpenTherm Library to control Central Heating (CH), HVAC (Heating, Ventilation, Air Conditioning) or Solar systems by creating a thermostat using Arduino IDE and ESP32 / ESP8266 hardware.
ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3), ESP8266 WiFi Connection Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
Light-Weight MultiWiFi/Credentials Async WiFiManager for ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3) and ESP8266 boards. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Start serving a local webpage if cannot connect to WiFi, also include Buffer for to WiFi client to prevent small packets with partial messages being sent.
This library providing the possibility to call a function at specific ESP32 Control module.This library support all version of ESP32 Control module,ERS ,E1.0
This library providing the possibility to call a function at specific ESP32 Control module.This library support all version of ESP32 Control module,ERS ,E1.0
A library for driving self-timed digital RGB/RGBW LEDs (WS2812, SK6812, NeoPixel, WS2813, etc.) using the Espressif ESP32 microcontroller"s RMT output peripheral.
ESP32LitePack, M5Lite, A lightweight compatibility library. Support Devices:M5StickC, M5StickC Plus, M5Stack BASIC, M5Stack GRAY, M5Stack FIRE, M5Stack Core2, M5Stack ATOM Lite, M5Stack ATOM Matrix, M5Stack ATOM ECHO
Simple library for sending and recieving booleans, bytes, integers, and float variables over UDP. The esp32 can be connected to a wifi network or create its own hotspot.
ESP32 + LwIP ENC28J60, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
(ESP32 + LwIP W5500 / ENC28J60), including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager, with enhanced GUI and fallback Web ConfigPortal.
This library enables you to use Interrupt from Hardware Timers on an ESP32, ESP32_S2, ESP32_S3 or ESP32_C3-based board to create and output PWM to pins.
ESP32 + LwIP W5500, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
Simple WebServer library for AVR, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, SIPEED_MAIX_DUINO and RP2040-based (RASPBERRY_PI_PICO) boards using ESP8266/ESP32 AT-command shields with functions similar to those of ESP8266/ESP32 WebServer libraries
WizFi360/ESP8266/ESP32-AT library for Arduino providing an easy-to-use way to control WizFi360/ESP8266-AT/ESP32-AT WiFi shields using AT-commands. For AVR, Teensy, SAM DUE, SAMD21, SAMD51, STM32, nRF52, SIPEED_MAIX_DUINO and RP2040-based (Nano_RP2040_Connect, RASPBERRY_PI_PICO, etc.) boards using WizFi360/ESP8266/ESP32 AT-command shields.
WiFi/Credentials Manager for nRF52, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, etc. boards using WizFi360/ESP8266/ESP32-AT-command shields with fallback web configuration portal. Credentials are saved in EEPROM, SAMD FlashStorage, DueFlashStorage or nRF52/RP2040 LittleFS.
Light-Weight WiFi/Credentials Manager for AVR Mega, SAM DUE, SAMD, nRF52, STM32, RP2040-based Nano_RP2040_connect, RASPBERRY_PI_PICO boards, etc. using WizFi360/ESP8266/ESP32-AT-command shields. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Library to detect a multi reset within a predetermined time, using RTC Memory, EEPROM, LittleFS or SPIFFS for ESP8266 and ESP32, ESP32_C3, ESP32_S2, ESP32_S3
Library to configure MultiWiFi/Credentials at runtime for ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3) and ESP8266 boards. With enhanced GUI and fallback web ConfigPortal.
Light-Weight MultiWiFi/Credentials Manager for ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3) and ESP8266 boards. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Simple Ethernet WebServer, HTTP Client and WebSocket Client library for AVR, AVR Dx, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52 and RASPBERRY_PI_PICO boards using Ethernet shields W5100, W5200, W5500, W6100, ENC28J60 or Teensy 4.1 NativeEthernet/QNEthernet
Simple TLS/SSL Ethernet WebServer, HTTP Client and WebSocket Client library for for AVR, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52 and RASPBERRY_PI_PICO boards using Ethernet shields W5100, W5200, W5500, ENC28J60 or Teensy 4.1 NativeEthernet/QNEthernet. It now supports Ethernet TLS/SSL Client.
Simple TLS/SSL Ethernet WebServer, HTTP Client and WebSocket Client library for STM32F/L/H/G/WB/MP1 boards running WebServer using built-in Ethernet LAN8742A, Ethernet LAN8720, W5x00 or ENC28J60 shields. It now supports Ethernet TLS/SSL Client.
EthernetWebServer_STM32 is a simple Ethernet WebServer, HTTP Client and WebSocket Client library for STM32F/L/H/G/WB/MP1 boards using built-in Ethernet LAN8742A, LAN8720, Ethernet W5x00 or ENC28J60 shields
Simple Ethernet library for AVR, AVR Dx, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52 and RASPBERRY_PI_PICO boards using Ethernet shields W5100, W5200, W5500, W5100S, W6100
Simple Ethernet Manager for Teensy, SAM DUE, SAMD, nRF52, ESP32 (including ESP32-S2/C3), ESP8266, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, etc. boards. Config data saved in ESP LittleFS, SPIFFS or EEPROM, nRF52 LittleFS, EEPROM, DueFlashStorage or SAMD FlashStorage.
Simple Ethernet Manager for STM32F/L/H/G/WB/MP1 boards with Ethernet LAN8720, W5x00, ENC28J60 or built-in LAN8742A shields, with or without SSL, configuration data saved in EEPROM. With DoubleResetDetect feature.
ezTime - pronounced "Easy Time" - is a very easy to use Arduino time and date library that provides NTP network time lookups, extensive timezone support, formatted time and date strings, user events, millisecond precision and more.
ESP32 VGA, PAL/NTSC Color Composite, SSD1306 ILI9341 ST7789 Controller, PS/2 Mouse and Keyboard Controller, Graphics Library, Graphical User Interface (GUI), Sound Engine, Game Engine and ANSI/VT Terminal
A library for implementing fixed-point in-place Fast Fourier Transform on Arduino. It sacrifices precision and instead it is way faster than floating-point implementations.
The FlashStorage_RTL8720 library aims to provide a convenient way to store and retrieve user data using the non-volatile flash memory of Realtek RTL8720DN, RTL8722DM, RTM8722CSM, etc.
The FlashStorage library aims to provide a convenient way to store and retrieve user"s data using the non-volatile flash memory of SAMD21/SAMD51. It"s using the buffered read and write to minimize the access to Flash. It now supports writing and reading the whole object, not just byte-and-byte.
The FlashStorage_STM32 library aims to provide a convenient way to store and retrieve user data using the non-volatile flash memory of STM32F/L/H/G/WB/MP1. It is using the buffered read and write to minimize the access to Flash. It now supports writing and reading the whole object, not just byte-and-byte. New STM32 core v2.0.0+ is also supported now.
The FlashStorage_STM32F1 library aims to provide a convenient way to store and retrieve user"s data using the non-volatile flash memory of STM32F1/F3. It"s using the buffered read and write to minimize the access to Flash. It now supports writing and reading the whole object, not just byte-and-byte. New STM32 core v2.0.0+ is supported now.
FTP Client for Generic boards such as AVR Mega, megaAVR, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based (Nano-RP2040-Connect, RASPBERRY_PI_PICO, RP2040W, etc.), ESP32/ESP8266 using Ethernet
The GCodeParser library is a lightweight G-Code parser for the Arduino using only a single character buffer to first collect a line of code (also called a "block") from a serial or file input and then parse that line into a code block and comments.
Basic to advanced line following, intersection detection, basic motor control, battery monitoring, gripper control, and basic collision detection with the Gobbit robot.
Enables GSM/GRPS network connection using the Generic GSM shields/modules. Supporting ESP32 (including ESP32-S2, ESP32-C3), ESP8266, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based boards, etc.
Arduino library for the Flysky/Turnigy RC iBUS protocol - servo (receive) and sensors/telemetry (send) using hardware UART (AVR, ESP32 and STM32 architectures)
This library provides an interface to control a stepper motor through Infineon’s Stepper Motor Control Shield "KIT_XMC1300_IFX9201" with h-bridge IFX9201 and XMC1300 microcontroller.
Treat PCF8574, MCP23017 and Shift registers like pins, matrix keypad, touch screen handler, button press and rotary encoder management (switches) on any supported IO (including DfRobot & Joysticks) with event handling, interchangable AVR/I2C(AT24) EEPROMs.
This library uses polymorphism and defines common interfaces for reading encoders and controlling motors allowing for easy open or closed loop motor control.
LiquidCrystal fork for displays based on HD44780. Uses the IOAbstraction library to work with i2c, PCF8574, MCP23017, Shift registers, Arduino pins and ports interchangably.
LittleFS for esp32 based on esp_littlefs IDF component. Use esp32 core-provided LITTLEFS library instead of this one when available in future core releases.
An all in one, easy to use, powerful, self contained button library so you can focus on your other code! Includes Debouncing, Avoids Delays, multiclicks and allows you to decide what happens at the beginning and end of Short, Long, Hold and Shifts so you can create a intuative and responsive experience.
This library enables you to use ISR-based PWM channels on RP2040-based boards, such as Nano_RP2040_Connect, RASPBERRY_PI_PICO, with Arduino-mbed (mbed_nano or mbed_rp2040) core to create and output PWM any GPIO pin.
Arduino library for MCP4728 quad channel, 12-bit voltage output Digital-to-Analog Convertor with non-volatile memory and I2C compatible Serial Interface
mDNS Library for ESP32, ESP8266, nRF52, SAMD21, SAMD51, SAM DUE, STM32F/L/H/G/WB/MP1, Portenta_H7, AVR Mega, RP2040-based boards, etc. using Ethernet W5x00, ESP WiFi, WiFiNINA or ESP8266-AT shields
This library enables you to use Hardware-based PWM channels on megaAVR-based boards, such as UNO WiFi Rev2, AVR_Nano_Every, etc., to create and output PWM.
This library enables you to use ISR-based PWM channels on an Arduino megaAVR board, such as UNO WiFi Rev2, AVR_Nano_Every, etc., to create and output PWM any GPIO pin.
Replace Arduino methods with mocked versions and let you develop code without the hardware. Run parallel hardware and system development for greater efficiency.
Library to detect a multi reset, using EEPROM, DueFlashStorage, FlashStorage_SAMD, FlashStorage_RTL8720, FlashStorage_STM32 or LittleFS/InternalFS. For AVR, Teensy, SAM DUE, SAMD, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, RTL8720DN, MBED nRF52840-based Nano_33_BLE, Portenta_H7, etc. boards. Now using efficient FlashStorage_STM32 library and supporting new RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO and STM32 core v2.0.0
Connects to MySQL or MariaDB using ESP8266/ESP32, WT32_ETH01 (ESP32 + LAN8720A), nRF52, SAMD21/SAMD51, STM32F/L/H/G/WB/MP1, Teensy, SAM DUE, Mega, RP2040-based boards, Portenta_H7, etc. with W5x00, ENC28J60 Ethernet, Teensy 4.1 NativeEthernet/QNEthernet, WiFiNINA modules/shields or Portenta_H7 WiFi/Ethernet. W5x00 can use Ethernet_Generic library. ENC28J60 can use either EthernetENC or UIPEthernet Library.
This library enables you to use ISR-based PWM channels on an nRF52-based board using Arduino-mbed mbed_nano core such as Nano-33-BLE to create and output PWM any GPIO pin.
This library enables you to use ISR-based PWM channels on an nRF52-based board using Adafruit_nRF52_Arduino core such as Itsy-Bitsy nRF52840 to create and output PWM any GPIO pin.
The library for OpenBCI Ganglion board. Please use the DefaultGanglion.ino file in the examples to use the code that ships with every Ganglion board. Look through the skimmed down versions of the main firmware in the other examples.
OpenDevice is a set of tools and APIs to build solutions for the "Internet of Things" like home automations systems, robotics, smart city, energy monitoring, security, sensor monitoring
A library written in C++ to encode/decode PDU data for GSM modems. Both GSM 7-bit and UCS-2 16 bit alphabets are supported which mean, in practice, you can send/receive SMS in any language (including emojis).
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of Portenta_H7_AsyncTCP library for Portenta_7, using Vision-shield thernet or Murata WiFi.
This is a library aiming at implementing pid control to control the position of a DC motor with feedback from quadrature encoder using speed control driver that accepts PWM input. It is a multifunctional program with extra feature of tuning the gain parameters and very useful for robotic enthusiast in wheeled robots
his library enables you to use Hardware-based PWM channels on RP2040-based boards, such as Nano_RP2040_Connect, RASPBERRY_PI_PICO, with either Arduino-mbed (mbed_nano or mbed_rp2040) or arduino-pico core to create and output PWM to any GPIO pin.
This library enables you to use SPI SD cards with RP2040-based boards such as Nano_RP2040_Connect, RASPBERRY_PI_PICO using either RP2040 Arduino-mbed or arduino-pico core.
This library enables you to use ISR-based PWM channels on RP2040-based boards, such as ADAFRUIT_FEATHER_RP2040, RASPBERRY_PI_PICO, etc., with arduino-pico core to create and output PWM any GPIO pin.
The most powerful and popular available library for using 7/14/16 segment display, supporting daisy chaining so you can control mass amounts from your Arduino!
Provides methods to retrieve instant and peak values from the ADC input. The Arduino library SensorWLED splits the input from a varying analog signal from the ADC into components, i.e., provides the capability of a sample-and-hold circuit.
A user interface through the serial channel (menus, sub-menus and command execution), with support for navigation through the menu hierarchy and online help.
Enables smooth servo movement. Linear as well as other (Cubic, Circular, Bounce, etc.) ease movements for servos are provided. The Arduino Servo library or PCA9685 servo expanders are supported.
An associative container used either as a list or btree without needing std lib, and a concurrent circular buffer. Works from AVR/Uno upwards to ESP32, mbed etc
Use the low-power high-resolution ICM 20948 9 DoF IMU from Invensense with I2C or SPI. Version 1.2 of the library includes support for the InvenSense Digital Motion Processor (DMP™).
The VL6180 combines an IR emitter, a range sensor, and an ambient light sensor together for you to easily use and communicate with via an I2C interface.
The ZX Sensor uses infrared light to determine the distance from an object and where the object is located on the X axis (between IR LEDs), available from SparkFun Electronics
This is a library aiming at implementing pid control to control the speed of a DC motor with feedback from quadrature encoder. It is a multifunctional program with extra feature of tuning the gain parameters and very useful for robotic enthusiast in wheeled robots
Statistic, Sum, Max, Min, Sq_Sum, Arithmetic Average, Geometric Average, RMS Average, Ext RMS Average, Bubble Sort, Median, Standard Deviation, Standard Deviation Error, Coefficient Factor, Average, Stream, Regression, Slope, Data, Analyse
Enables reading and writing on SD card using SD card slot connected to the SDIO/SDMMC-hardware of the STM32 MCU. For slots connected to SPI-hardware use the standard Arduino SD library.
BufferedPrint stream for efficient networking. ChunkedPrint for HTTP chunked encoding. ChunkedStreamReader for HTTP chunked decoding. CStringBulder builds a c-string with Print class methods. StringReadStream to wrap string as Stream. And printf() function with formatting string from F macro.
Menu library for Arduino with IoT capabilities that supports many input and display devices with a designer UI, code generator, CLI, and strong remote control capability.
Adds tcUnicode UTF-8 support to Adafruit_GFX, U8G2, tcMenu, and TFT_eSPI graphics libraries with a graphical font creation utility available. Works with existing libraries
This library enables you to use Hardware-based PWM channels on Teensy boards, such as Teensy 2.x, Teensy LC, Teensy 3.x, Teensy 4.x, Teensy MicroMod, etc., to create and output PWM to pins. Using the same functions as other FastPWM libraries to enable you to port PWM code easily between platforms.
This library enables you to use ISR-based PWM channels on Teensy boards, such as Teensy 2.x, Teensy LC, Teensy 3.x, Teensy 4.x, Teensy MicroMod, etc., to create and output PWM any GPIO pin.
A library for creating Tickers which can call repeating functions. Replaces delay() with non-blocking functions. Recommanded for ESP and Arduino boards with mbed behind.
This library enables you to use Interrupt from Hardware Timers on supported Arduino boards such as AVR, Mega-AVR, ESP8266, ESP32, SAMD, SAM DUE, nRF52, STM32F/L/H/G/WB/MP1, Teensy, Nano-33-BLE, RP2040-based boards, etc.
A simple library to display numbers, text and animation on 4 and 6 digit 7-segment TM1637 based display modules. Offers non-blocking animations and scrolling!
Really tiny library to basic RTC functionality on Arduino. DS1307, DS3231 and DS3232 RTCs are supported. See https://github.com/Naguissa/uEEPROMLib for EEPROM support. Temperature, Alarms, SQWG, Power lost and RAM support.
Monochrome LCD, OLED and eInk Library. Display controller: SSD1305, SSD1306, SSD1309, SSD1312, SSD1316, SSD1318, SSD1320, SSD1322, SSD1325, SSD1327, SSD1329, SSD1606, SSD1607, SH1106, SH1107, SH1108, SH1122, T6963, RA8835, LC7981, PCD8544, PCF8812, HX1230, UC1601, UC1604, UC1608, UC1610, UC1611, UC1617, UC1638, UC1701, ST7511, ST7528, ST7565, ST7567, ST7571, ST7586, ST7588, ST75160, ST75256, ST75320, NT7534, ST7920, IST3020, IST3088, IST7920, LD7032, KS0108, KS0713, HD44102, T7932, SED1520, SBN1661, IL3820, MAX7219, GP1287, GP1247, GU800. Interfaces: I2C, SPI, Parallel.
True color TFT and OLED library, Up to 18 Bit color depth. Supported display controller: ST7735, ILI9163, ILI9325, ILI9341, ILI9486,LD50T6160, PCF8833, SEPS225, SSD1331, SSD1351, HX8352C.
A rotary encoder library that allows the callback of up to 9 different functions representing the same number of different encoder events. These different functions can be associated with events like press rotate and long press among many others.
RFC6455-based WebSockets Server and Client for Arduino boards, such as nRF52, Portenta_H7, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, Teensy, SAM DUE, RP2040-based boards, besides ESP8266/ESP32 (ESP32, ESP32_S2, ESP32_S3 and ESP32_C3) and WT32_ETH01. Ethernet shields W5100, W5200, W5500, ENC28J60, Teensy 4.1 NativeEthernet/QNEthernet or Portenta_H7 WiFi/Ethernet. Supporting websocket only mode for Socket.IO. Ethernet_Generic library is used as default for W5x00. Now supporting RP2040W
Light-Weight MultiWiFi/Credentials Manager for Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RTL8720, etc. boards running Generic WiFi (WiFiNINA, WiFi101, ESP8266-AT, ESP32-AT, etc.) modules/shields. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Enables network connection (local and Internet) and WiFiStorage for SAM DUE, SAMD21, SAMD51, Teensy, AVR (328P, 32u4, 16u4, etc.), Mega, STM32F/L/H/G/WB/MP1, nRF52, NINA_B302_ublox, NINA_B112_ublox, RP2040-based boards, etc. in addition to Arduino MKR WiFi 1010, Arduino MKR VIDOR 4000, Arduino UNO WiFi Rev.2, Nano 33 IoT, Nano RP2040 Connect. Now with fix of severe limitation to permit sending much larger data than total 4K and using new WiFi101_Generic library
Simple WiFiWebServer, HTTP Client and WebSocket Client library for AVR Mega, megaAVR, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based (Nano-RP2040-Connect, RASPBERRY_PI_PICO, RASPBERRY_PI_PICO_W, ESP32/ESP8266, etc.) boards using WiFi, such as WiFiNINA, WiFi101, CYW43439, U-Blox W101, W102, ESP8266/ESP32-AT modules/shields, with functions similar to those of ESP8266/ESP32 WebServer libraries.
Simple WiFiWebServer, HTTP Client, MQTT and WebSocket Client library for Realtek RTL8720DN, RTL8722DM, RTM8722CSM boards using WiFi. Supporting WiFi at 2.4GHz and 5GHz
Universal Timer with 1 millisecond resolution, based on system uptime (i.e. Arduino: millis() function or STM32: HAL_GetTick() function), supporting OOP principles.

It seems that face recognition is no longer working (at least with the example program) when using the 1.02 ESP core. Rolling back to the 1.01 core and using the example program belonging to that core, will "fix" it
The WiFi driver conflicts with the SPI bus. Possible solution to use a different library. The problem arose at the time of the initialization of the WiFi module.
The main problem is that the ESP32-CAM module has a limited number of free legs. Part of the ports is used for the camera, part in parallel with the sd-card. The sd-card connector is installed on the board. Another conclusion (IO4) is the LED flashlight.
I2C Display B / W is not of particular interest for real use with the image received from the camera. TFT color and high resolution. On it you can already see the face. On such a display or a little higher resolution, you can make the Door Eye
I will say right away that the library from AdaFruit is not the fastest. I managed to display a couple of frames per second. It is more promising to use libraries that work at a low level. But I was not able to get an ESP32_TFT_library with my display 1.44 "128x128 SPI V1.1. Maybe ILI9163 is not supported. I took 1.8" 128 * 160 SPI TFT and I managed to squeeze about 12 FPS! Link
When using two ports, one of the HSPI or VSPI hardware ports on the microcontroller and display with the ILI9341 driver can receive 30 frames per second ( link ).
#include
#defineBACKCOLOR 0x0000// Black #define PIXELCOLOR 0xFFFF // White #define FRAME_WIDTH 320 #define FRAME_HEIGHT 240 uint16_t pixel_color = 0; esp_err_t camera_capture(){ //acquire a frame camera_fb_t * fb = esp_camera_fb_get(); if (!fb) { ESP_LOGE(TAG, "Camera Capture Failed"); return ESP_FAIL; } int i = 0; for(int y = 0; y < SCREEN_HEIGHT; y++){ for(int x = 0; x < SCREEN_WIDTH; x++){ i = y * FRAME_WIDTH + x; // FRAMESIZE_QVGA // 320x240 char ch = (char)fb->buf[i]; if (ch > 128) pixel_color = WHITE; else pixel_color = BLACK; // Draw a single pixel in white display.drawPixel(x, y, pixel_color); } } display.display(); //return the frame buffer back to the driver for reuse esp_camera_fb_return(fb); Serial.println("Capture frame ok."); return ESP_OK; }
// Configuration for other boards, set the correct values for the display used //---------------------------------------------------------------------------- #define DISP_COLOR_BITS_24 0x66 //#define DISP_COLOR_BITS_16 0x55 // Do not use! // ############################################# // ### Set to 1 for some displays, ### // for example the one on ESP-WROWER-KIT ### // ############################################# #define TFT_INVERT_ROTATION 0 #define TFT_INVERT_ROTATION1 0 // ################################################ // ### SET TO 0X00 FOR DISPLAYS WITH RGB MATRIX ### // ### SET TO 0X08 FOR DISPLAYS WITH BGR MATRIX ### // ### For ESP-WROWER-KIT set to 0x00 ### // ################################################ #define TFT_RGB_BGR 0x08 // ############################################################## // ### Define ESP32 SPI pins to which the display is attached ### // ############################################################## // The pins configured here are the native spi pins for HSPI interface // Any other valid pin combination can be used #define PIN_NUM_MISO 12 // SPI MISO #define PIN_NUM_MOSI 13 // SPI MOSI #define PIN_NUM_CLK 14 // SPI CLOCK pin #define PIN_NUM_CS 15 // Display CS pin #define PIN_NUM_DC 2 // Display command/data pin #define PIN_NUM_TCS 0 // Touch screen CS pin (NOT used if USE_TOUCH=0) // -------------------------------------------------------------- // ** Set Reset and Backlight pins to 0 if not used ! // ** If you want to use them, set them to some valid GPIO number #define PIN_NUM_RST 0 // GPIO used for RESET control #define PIN_NUM_BCKL 0 // GPIO used for backlight control #define PIN_BCKL_ON 0 // GPIO value for backlight ON #define PIN_BCKL_OFF 1 // GPIO value for backlight OFF // -------------------------------------------------------------- // ####################################################### // Set this to 1 if you want to use touch screen functions // ####################################################### #define USE_TOUCH TOUCH_TYPE_NONE // ####################################################### // ####################################################################### // Default display width (smaller dimension) and height (larger dimension) // ####################################################################### #define DEFAULT_TFT_DISPLAY_WIDTH 128 #define DEFAULT_TFT_DISPLAY_HEIGHT 160 // ####################################################################### #define DEFAULT_GAMMA_CURVE 0 #define DEFAULT_SPI_CLOCK 32000000 #define DEFAULT_DISP_TYPE DISP_TYPE_ST7735B //---------------------------------------------------------------------------- #define TFT_INVERT_ROTATION 0 #define TFT_INVERT_ROTATION1 1 #define TFT_INVERT_ROTATION2 0
esp_err_t camera_capture(){ uint32_t tstart, t1, t2; tstart = clock(); //acquire a frame camera_fb_t * fb = esp_camera_fb_get(); if (!fb) { printf("Camera Capture Failed\n"); return ESP_FAIL; } t1 = clock() - tstart; printf("Capture camera time: %u ms\r\n", t1); int i = 0, bufPos = 0; uint8_t hb, lb; color_t color; color_t *color_line = heap_caps_malloc(_width*3, MALLOC_CAP_DMA); tstart = clock(); for(int y = 0; y < _height; y++) { bufPos = 0; for(int x = 0; x < _width; x++) { i = (y * FRAME_WIDTH + x) << 1; hb = fb->buf[i] ; lb = fb->buf[i + 1]; color.r = (lb & 0x1F) << 3; color.g = (hb & 0x07) << 5 | (lb & 0xE0) >> 3; color.b = hb & 0xF8; color_line[bufPos] = color; bufPos++; // TFT_drawPixel(0, 0, color, 1); } disp_select(); send_data(0, y, _width-1, y, _width, color_line); wait_trans_finish(1); disp_deselect(); } free(color_line); t1 = clock() - tstart; printf("Send buffer time: %u ms\r\n", t1); esp_camera_fb_return(fb); printf("Capture frame ok.\n"); return ESP_OK; }
// #if defined(CAMERA_MODEL_AI_THINKER) #define PWDN_GPIO_NUM 32 #define RESET_GPIO_NUM -1 #define XCLK_GPIO_NUM 0 #define SIOD_GPIO_NUM 26 #define SIOC_GPIO_NUM 27 #define Y9_GPIO_NUM 35 #define Y8_GPIO_NUM 34 #define Y7_GPIO_NUM 39 #define Y6_GPIO_NUM 36 #define Y5_GPIO_NUM 21 #define Y4_GPIO_NUM 19 #define Y3_GPIO_NUM 18 #define Y2_GPIO_NUM 5 #define VSYNC_GPIO_NUM 25 #define HREF_GPIO_NUM 23 #define PCLK_GPIO_NUM 22 void camera_init_(){ camera_config_t config; config.ledc_channel = LEDC_CHANNEL_0; config.ledc_timer = LEDC_TIMER_0; config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM; config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM; config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM; config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM; config.pin_xclk = XCLK_GPIO_NUM; config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sscb_sda = SIOD_GPIO_NUM; config.pin_sscb_scl = SIOC_GPIO_NUM; config.pin_pwdn = PWDN_GPIO_NUM; config.pin_reset = RESET_GPIO_NUM; config.xclk_freq_hz = 20000000; config.fb_count = 2; // for display config.frame_size = FRAMESIZE_QVGA; config.pixel_format = PIXFORMAT_RGB565; // camera init esp_err_t err = esp_camera_init(&config); if (err != ESP_OK) { printf("Camera init failed with error 0x%x", err); return; } printf("Camera init OK\n"); }
Several times I caught in the logs "Brownout detector was triggered" so I turned off the detector. Because at first I fed the backlight display from the 3.3V output of the ESP32-CAM
ESP32 low-cost functional module. There is a catastrophic lack of conclusions for implemented ports in the CAM version of the board, so choose the CAM version if you really need a camera.

Right now I"m working to integrate the data plotter and the image viewer features in the main repository of qSerialTerm. Everything should be ready by next week.
In particular, you should check that you are receiving correct data using the default configuration. Then, test that your SCCB interface is working, you should be able to read the OV7670 registers and see their default values.
When doing the YCbCr -> RGB conversion, be sure to use floats/double when carrying out the operations and then limit the obtained R, G, B values between 0 and 255.
Dang not sure how I missed that one. I was using integer. Even with that change I did not get good color image. I had to use register settings I got from Linux driver to get a good image. Not sure why.
About qSerialTerm, it is a quite useful program. The only reason I have not used is that I would have to compile the program myself. That means I have to setup the whole QT environment. Untill now all my time was used up in debugging the camera.
I"m getting a "correct" color image using the above conversion equations, in the sense that the image doesn"t get distorted. But the colors are no good, because instead of green I see magenta and so on.
I have tested the conversion equations against Octave"s rgb2ycbcr function, and it works fine. Maybe the OV7670 follows another conversion standard?. I have also tried switching Cb <-> Cr without any noticeable change in the color output.
We currently have an OV7670 which correctly gives us test patterns, however gives us terribly saturated images with completely incorrect colours. Are you able to share those register settings, or some us advice about how to set this device up for normal looking images? Thanks very much,
I am currently working on real time image processing using FPGA. For that i am using OV7670 camera module. I have got real time video but with wrong colors(mostly magneta color). Can you please mail me the correct color settings?
if I want to use an external clock, do I have to connect the oscillator between XCLK and ground directly or do I need to add a capacitor in series (XCLK - oscillator - cap - GDN)? If yes, which value for the capacitor?
I have a ceramic resonator @ 16Mhz (http://it.rs-online.com/web/p/risonatori-ceramici/5266154/), but it has 3 pins instead of two. Searching on google I"ve seen the the the central pin must be connected to the ground, but I"m stuck with the others two.
Ceramic resonator require an active oscillator circuit. These active oscillators are usually integrated inside microcontrollers, and you have access to it via two pins usually labelled OSC_IN and OSC_OUT.
The OSC_OUT pin won"t have enough current drive and no clock will be produced. This implies that neither your microcontroller nor the OV7670 will work.
I"m using BeagleBone with QNX. But BeagleBone seems not provide an external clock. If I use an external oscillator (crystal) do I have connect one pin to the XCLK and one to the ground without capacitors?
I"ve just found a pin with an external clock on BeagleBone... :) (my fault!) In this case I suppose I have to connect the pin directly to the XCLK (sharing the same GND). Right?
The STM32 F2/F4 microcontrollers have a DCMI peripheral that simplifies the data reception from the camera. I don"t know if the BeagleBone have something similar.
i have interfaced ov7690 with stm32f4 and PIC. i get data in both rgb565 and yuv422 and reconstuct the image . but the image is not so good. u can look my post at
What do you mean with "the image is not so good"? Are you getting a clear image with the wrong colors or are you getting random pixels? Does the grayscale (only the Y channel) image looks clear?
AFAIK in YUV422 mode, getting the right colors with the OV7670 requires some heavy calibration, as stated by brijesh in his/her comment; but the grayscale version should look clear like the image I posted.
Hi Jorge, nice page you have here, seems you have been studying quite a fair bit on OV7670. I am also working on something similar but using AVR uC instead (Atmega16/32) with OV7670 FIFO version and works pretty well.
I am using YUV mode and using the YUV422 equations give me a pretty good looking image, a bit soft but not bad (http://thinksmallthings.wordpress.com/2012/11/03/ov7670-yuv-demystified/).
I"am unable to read proper image data, SCCB works fine for me and I can read registers, but for example when i"m reading frames with my lens covered i get some random numbers - where as you wrote there should be 128 0 pattern. I"m using camera mode with FIFO buffer embedded. Could you send me your code for reading frames ? Or will you be able to help me with this ? I"m using STM32F103VC
I haven"t used the OV7670 FIFO version and I used the STM32F4 which has a Digital Camera Interface (DCMI) that the STM32F1 doesn"t have. That"s the reason my code won"t really help.
Make sure you are supplying a correct clock (12-24 MHz) to the OV7670 XCLK pin. The SCCB works WITHOUT the XCLK, so a working SCCB doesn"t guarantee a working parallel interface (D0-D7).
I"ve just tried to get SCCB working on my OV7670 (like yours: no FIFO) and it looks like it doesn"t work at all until I connect clock source to XCLK pin. After successful test implementation (got 0x80 from 0x01 register etc) i tried to disconnect XCLK signal and it simply stopped working. So it seems to me that XCLK is necessary for SCCB operation.
In the module I use, (ov7970 without fifo) the DVDD pad (core voltage) is simply filtered to ground via capacitor thus ov7670 will generate 1.8 from DOVDD. This requires the DOVDD to range from 2.45V to 3V.
The (blue) model I used in this post has internal LDO regulators. You must have the (black?) model that is wired directly. I have also used the latter with a 3.3V supply and a series Schottky diode.
You need to drive the XCLK pin with a clock signal to make the OV7670 parallel interface (D0-D7) work to get any image data out of it. Also a user reported here that driving the XCLK pin is also necessary to get the SCCB interface working.
Wow, Jorge, it looks like your post has struck a chord with a number of users! If I may throw another question into the fray, I am thinking about using a microprocessor (thinking mbed, but not sure yet) to sample from multiple OV7670s. I don"t need to capture every frame from every camera, just be able to grab a picture from camera 1, then from 2, etc. at whatever rate the processor can manage. Any thoughts on how one might do this with some sort of bus, or would this require a separate processor for each camera?
(1) Hooking multiple OV7670s to the same uC will require a digital circuit to act as a multiplexer and will increase the capacitive load of the logic lines (XCLK, D0-D7), which can degrade or totally corrupt the data.
(3) The OV7670 outputs raw data, that means each frame of 640x480 color pixels equals a minimum of 600 KiB (YUV422 format). This implies you can"t keep one frame in the uC RAM memory (usually less than 200 KiB), so you"ll need to stream the frame to a bigger memory as soon as possible.
I have only the following parts which are OV7670 and Arduino uno board. I wrote my code and I have to cheange the clock function code to either read or write in the registers of the camera"OV7670". But, I can"t get any response from the camera.
You got me there. I don"t have experience with Linux when it comes to accessing peripherals, for this post I used a microcontroller without OS. AFAIK, Linux is more restrictive on specific memory/register access.
My wild guess, is that you"ll need to create a C/C++ project and link/add the necessary Linux drivers (either a parallel interface or the image sensor interface + network interfaces). After that, pretty much everything is specific to your NGW100 board.
"**: On some models the VDD is directly connected to the OV7670 sensor AVDD and DOVDD, in this case VDD should be below 3.0V. With this model I have used a 3.3V supply with a series Schottky diode without problems.
**: There are other models (like the blue one I used in this post) which contain LDO regulators between the VDD and the OV7670 sensor AVDD and DOVDD. I"m not sure how much input voltage these regulators can stand, but I have used 3.3V directly without problems."
Could you please have a look and tell me which kind of supply I need to provide to this camera? And maybe also where are LDO regulators placed (if there are...)?
Hi Jorge, I am trying to store the data in an array that captured from OV7670. I"d like to implement in Keil 4. Can you send me this project? I will surely compensate your effort (which an amount we both agree :) adnanoktar41@hotmail.com
I don"t think you can interface this version of the OV7670 module with a 8 bit uC, because the data is streamed at very high speeds and your uC RAM is way too small.
You might have more luck with the FIFO version (I don"t have experience with that version). But then again, a 8 bit uC has very little RAM so you would be able to process a very scaled down (in resolution) image. If you are using the uC as a buffer to a higher speed interface, then the lack of DMA and processing power will make the uC a bottleneck.
Not true I got it working with an arduino uno I get about 1fps at qvga. Also this is the version without the fifo see http://forum.arduino.cc/index.php?topic=159557.0 and check out my github project for working code https://github.com/ComputerNerd/arduino-camera-tft
On every PCLK transition you should read D0-D7 (one byte), these bytes you read should be a Cb byte, then a Y byte, next a Cr byte, a Y byte again, and the cycle repeats with Cb and so on. (Assuming you are correctly synchronized by HREF and VSYNC)
"A PCLK of 24 MHz will produce 30 fps, a PCLK of 12 MHz will produce 15 fps and so on. All this is independent of the format of the image (VGA, CIF, QCIF, etc)."
I mean, in my purpose I just need to sample the Y component and I can sample it only on the 2nd (and 4th and so on...) rising edge of a 24Mhz PCLK: so pratically I"m working with a 12Mhz pixel clock!
In order to have 30fps and assuming that I"m using the default parameters, I need to feed the XCLK of the camera with a 48Mhz clock... Is my idea right?
Take a



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey