
ramps 1.4 lcd touch screen factory

After connecting this panel to your Ramps you don"t need your pc any more, the Smart Controller supplies power for your SD card. Further more all actions like calibration, axes movements can be done by just using the rotary encoder on the Smart Controller.

In RAMPS 1.4 the capacitors and resistors are now surface mount (SMD) components. This provided more space for more passive components, as well as headers. This does add another set of steps to the assembly process, but we stuck with larger sizes to make it fairly painless.
There are multiple boards all based on the RAMPS 1.3/1.4 design with minor variations in form factors and components, for example Prusa, Ultimaker and others. Other incarnations combined the components of the Arduino ATmega and the RAMPS into a single board, some using ATMega128. They may have different power/rating capabilities but the basic structure and electrical behavior is very similar and we describe them as RAMPS compatible, in fact most boards in firmwares like Marlin are treated as derivate of RAMPS.
This section presents the basic steps to wire an assemble RAMPS 1.4 board assuming the more common scenarios. Check the #Assembly section to learn how to assemble your own Ramps 1.4 board.
Some notes on TMC2130: Getting TMC2130 stepper drivers to work on a RAMPS 1.4 board requires modifications to the board. TMC2130 stepper drivers are configure by software using SPI. TMC2130 drivers require the pins from AUX02 and AUX-3 to be available if for example you have an SD Card or and LCD, chances are that you won"t be able to setup the SPI interface for the TMC2130.
A RAMPS 1.4 board using traditional Pololu drivers provide from 1A to 1.2A of current and about 4V to a NEMA motor. The force a motor can produce is mainly measure by its holding torque (For example 3.2 kg-cm, You will also find this in Newtons or oz-in)
A motor will have 4 cables either directly attached or as a ribbon that has a (JST-XH) six pin connector in the motor. The other end of the connector will be a 4 pin header that attaches to the RAMPS board. (From the six pins of a motor only four are used on the connector.)
The RAMPS 1.4 has a 1N4004 diode labeled D1 which allows 12V to feed and power the Arduino Mega 2560 board. This diode is installed in most pre-assemble boards, thus the Arduino board is powered by the Ramps by default.
When the RAMPS is not powered or if the diode is not installed or cut/removed, the Arduino gets its power from USB or a power supply connected to its 2.1mm (center positive) power jack.
The 5V pin in that connector on RAMPS only supplies the 5V to the auxiliary servo connectors. It is designed so that you can jumper it to the VCC pin and use the Arduino"s power supply to supply 5V for extra servos if you are only powered from USB or 5V. Since there is not a lot of extra power from the Arduino"s power supply you can connect it directly to your 5V power supply if you have one. You can also leave this pin not connected if you have no plan to add extra servos.
First, the 1N4004 diode (Diode D1) connects the RAMPS input voltage to the Arduino Mega which has a recommended maximum input voltage of 12 volts. If your board does not have this diode soldered in (or if you cut it), you will need to power the Mega through the USB connector or through a separate 5v line, but this allows a higher RAMPS voltage.
DON"T secure Arduino/RAMPS with conductive screws through both mounting holes. The screw may cut into the positive trace creating a HIGH current short.
On R1+ board the extruder heater is connected to the plug labeled D9. This connector corresponds to the original D10 of RAMPS board and still responds to Arduino"s pin 10.
As of 2012 Marlin has built-in support for RAMPS 1.3 and Ramps 1.4 boards. Marlin"s Firmware up to version 1.1.9 and even version 2 compile with ease using new version of the Arduinos IDE. Compiling a firmware older than 1.1.x require changes to the code or to use an older IDE version.
The SRAMP Firmware is a fork of Marlin v1.1.9 exclusively tailored Mendel/Cartesian printers using 8Bit Microcontrollers. The firmware sports a new GCODE parser and aims to make it easier hobby builders to add features (LCD, SD, etc).
Working preconfigured Sprinter firmware can be downloaded here: File:UltiMachineRAMPS1-4Sprinter.zip. Mechanical is in the folder ending with ME, optical endstop firmware is in the folder ending in OE.
A BOM for sourcing the RAMPS components from Mouser is also available in this google spreadsheet (This list is incomplete and has missing or incorrect quantities.)
Solder 1 1x6, 6 1x4, and 7 2x3 pin headers on top of the board. The long post should be standing up to take a connector. Solder one leg on each one to tack them into place. Then re-heat the joint and push on the component until it is perfectly situated. Then you"ll want to solder the rest of the leads. You will get burnt if you touch the other side of the pin you are soldering.
D1 should only be installed if the 5A rail is powered by 12V. It can be omitted and the Arduino will be powered from USB. You will want D1 installed if you add components to print without a PC. To reiterate, D1 MUST be omitted if you are powering the 5A rail by more than 12V, or the power is not absolutely clean, otherwise you may damage your ramps.
Since the fuses are the tallest parts, it is simpler and more convenient to solder them last. From this point on, solder the rest of the RAMPS in order of bottom pins, reset switch, terminals, mosfets and then fuses.
As there are (by 2019) many different producers of the RAMPS 1.4 board, some who have made their own changes to the design files, thus some boards have some close to critical issues. See examples below.
A "thermals" design flaw has been noted in the RAMPS 1.4 Eagle CAD files. This has been confirmed by visual inspection of production boards, which consistently shows only between two and three (almost never four) thermal-isolating traces per side of the PCB, to power-carrying pins, of under a 0.5 amp carrying-capacity per trace, assuming a 1oz copper thickness.
This image is also in error (it isn"t: it"s a photograph of an existing production RAMPS 1.4 board), the left two unpopulated pins on the image are for the always on fan and use very little current. So are not an issue (actually it is)
The problem may be fixed in the Eagle CAD files - for a future version of RAMPS only - by disabling "thermals" on the GND, +12V and the +12V2 Copper pour. However on existing (mass-produced) RAMPS 1.4 boards, estimating the total widths (including all thermals from all tracks on both sides of the PCB) checking with an online copper width calculator and adding up the total current, assuming a 1oz copper PCB the maximum safe current on the fuses (giving only a 10C rise in temperature of the thermal-isolation tracks) is only around 6 (six) amps and in other areas the maximum safe current (assuming the same 10C rise in temperature) is around 8 (eight) amps.
This problem may potentially be fixed on existing RAMPS 1.4 boards by augmenting the power traces with suitably-thick insulated wires with sufficient current-carrying capacity, soldering them to all the relevant pins.
Minimum total parallel trace with measured on the bed power rail was about 80mil, which would equate to a 4 amp safe limit using the above considerations. Board is marked with "www.bigtee-tech.com" where the "UltiMachine" and "reprap.org/wiki/RAMPS_1.4" markings are in the original 1.4 design.
Note the decreased isolation of the copper pours. Slikscren has the "reprap.org/wiki/RAMPS_1.4" marking but not the "UltiMachine" found on the original design.
On RAMPS/Arduino Mega the UART level are 5V but the BT module supports only 3.3V input. Therefore the TxD level has to be divided by resistor. This passive solution is fast enough for 115kBaud. Overall only 4 wires have to be soldered.

You can easy connect it to your Ramps board using the "smart adapter" included. After connecting this panel to your Ramps you don"t need your pc any more, the Smart Controller supplies power for your SD card.
LCD 12864 graphic smart display module with blue backlight, small and light appearance, suitbale for copiers, fax machines, laser printers, industrial test equipment, networking.

The LCD screen is vital for operating the printer. Should you encounter any kind of trouble, such as a dead screen, corrupted text, or other issues, please refer to the guide below.
First of all, unscrew the LCD screen from the printer frame, remove both M3x10 screw holding it the LCD board in the plastic casing, and remove it from the casing. See if the problem still appears when the LCD is not pressed by the casing.
Firmware updates are necessary to keep your printer up to date. However, the installation of incorrect firmware can lead to letter corruption on the LCD screen. There"s an easy fix, though:
There is a small chance the printer"s LCD screen can glitch out by electrostatic discharge when inserting the SD card. Try to turn the printer off and on again.
This problem usually appears only on user-assembled printers. If your printer"s LCD screen remains blank or displays corrupted symbols after you turn on the printer, there is a chance it is caused by incorrect wiring. Follow these steps to fix the issue.
If you suspect that the LCD ribbon cables connectors are not firmly seated in the slots, disconnect the LCD ribbon cables and check the slots for any bent pins. If there are bent pins, you can use tweezers to fix them. However, be very careful not to break the pin(s) completely.

In this instructable I will walk through all the components and steps required to setup a 3D Printer using the most commonly used RAMPS 1.4 controller board.
There are many other boards on the market and I"ve personally had good luck with the KFB2.0 board with acts almost identical to the RAMPS 1.4 but uses slightly different connectors.
Before adding the Stepper Drivers you need to decide what type of micro stepping is needed by the 3D Printer. I"m not going explain what exactly it means (there is plenty of articles on that). in general, when you buy a 1.8 deg. step angle (200 steps/revolution), the micro stepping becomes a multiplier. What"s important is that for the RAMPS 1.4 most precise stepping is 1/16th micro stepping (16 x 200 = 3200 steps/rotation).
If you are still unsure: Find a labeled pin on one or more corners of the stepper driver board (DIR, GND, ENABLE, VMOT) and match it up to the RAMPS pinouts.
It"s a bit hard to see on the smart Adapter I have here, but but you can kind of make out that the left connector (10 pins) says EXP2 and the right connector says EXP1. These correspond with the EXP1 and EXP2 connectors on the LCD board
power comes in on two tracks into the Ramps 1.4 shield. One track is 12V 5A which powers the board and motors, the second track is 12V 11A which powers the heated elements like the extruder and heated bed.
Also, note that when you plug in the RAMPS 1.4 with a USB cable to your computer the LCD will come one and you can program the Arduino that way. There is no power to run any motors or heating elements though. For that, you do need the external power source.
If you"re building a Prusa/RepRap type printer, you"ll employ 2 stepper motors for the Z-Axis. The RAMPS 1.4 shield has accounted for this and offers two rows of connection pins for the Z-Axis.
The RAMPS 1.4 comes with 6 end stop connections (X Min, X Max, Y Min, Y Max, Z Min, Z Max). Rarely do you use all six. What you"re really interested in is either the Max or Min. If you know one, you can limit movement based on it"s location (0) via the software (if I can detect Min and know my bed is only 200mm wide then I can tell the software to not move beyond min+200)
There are 3 wires coming from the end stop: RED/BLACK/GREEN IMPORTANT: make sure the wires correspond with the image above. If you turn around the connector on the RAMPS board and accidentally put the RED wire on the Signal (as opposed to +) YOU WILL SMELL SMOKE real fast.
If you forego the fancy Makerbot Switch (don"t do it for the price, it"s generally more about the size of the sensor) and instead go with a micro switch it"s my experience wiring is a bit easier. You really only need two wires. solder the wire to the two outside pins of the Micro switch and connect them to the -(minus) and s (signal) pin on the ramps.
The normal wiring setup generally means we hook the heat sink cooling fan to the 12V fan connector on the RAMPS 1.4. These fan pins can be found between the fuses and the X Stepper Driver (see image above). On the image the left pin is + so make sure the red wire from the fan connects to that one. Oh, and for some reason all wires on 3D printers seem to come at 1 meter but the cooling fan wires generally never do. Be prepared to extend them.
The RAMPS Board has 3 Thermistor hookups (2 extruders, 1 heated bed). The Thermistor wire for the extruder (The white skinny wires) go on T0. Polarity does not matter.
There you have it. All the wiring that was done for the Laminated 3D printer. These instructions are pretty much the same of any other RAMPS 1.4 installation. There are additional options such as Hotend Cooling fan and Auto Bed Leveling (both of which can be done with the standard RAMPS 1.4) but I"ll save those for another instructable.
The only jumpers you really care about are the jumpers that will be under the stepper drivers. if you fill the three rows under each stepper driver you will use, it will set the micro stepping to the highest (1/16th on the A4988). each jumper oriented shield to shield (see ramps image below). Microstepping options in other image
Hi, I’m trying to use this setup for a robotics project, how would I include sensors to trigger motors on the 2560 if the ramps has used all the pins? Do I run a master/slave setup
Can I use a MKS base board, v1.6 and control the printing action using Octoprint which will loaded on rasperby pi, instead of using the RAMPS kit ? and i was wondering how can i callibrate or it ? or if you have a guide to use step up the printer using MKS-BASE ?
Hi, i have a question. My arduino mega works fine but when i fit the Ramps 1.4 board to it and plug it into my computer the leds on the mega board do not come on nor does my computer acknowledge it either aubily or on device manager. If i take the ramps board off the mega is recognised. Am i right in assuming the ramps board is faulty?
that hasn"t happened to me so I can"t be certain. Certainly doesn"t sound right. Here"s a link with what sounds like an issue similar to yours (with some things to try) https://www.reddit.com/r/3Dprinting/comments/39mzvb/help_ramps_board_makes_arduino_stop_working/0
I"ve installed Marlin on my Arduino board, no issue. Installed the jumpers and drivers to the Ramps 1.4 board, plugged the Ramps into the Arduino, added the LCD adapter board and connected the LCD screen. Plug it into the computer with the USB cable and voila, she fires up great, ready to go. Unplug the USB and connect the Ramps board to my 12VDC power supply + to +, - to -, and *nothing*. My VOM is showing 12.1 volts at the connectors on the Ramps board, but no LED"s on the boards light up and the display screen doesn"t work. Unhook the power supply, reconnect the Ramps to the computer with the USB cable and it comes back to life. What gives? I"ve triple-checked every connection and it all matches documentation in this instructable. Am I right in thinking I got a bad Ramps board?More CommentsPost Comment

Hello everybody i’ve just built my first polograph machine followign this instructable https://www.instructables.com/id/Polargraph-Drawbot/ using the ramps 1.4 i’ve just uploaded the firmware to the board and i can controll it with the makelangelo software but the problem is that when i plug the lcd it dosen’t work i just get a blue screen and i’ve uploaded the same firrware as the instructable i have a reprap 12864 lcd does anyobdy knows how i can solve this problem thanks and i’m a beginner on this like said i’ve just finished building it today
I have modified code to use interrupts for 12864 LCD and RAMPS 1.4. Encoder works nicely now. How do I submit it for a PR so you can review it? I can’t push a new branch to the github repo.
Which LCD are you using? When I turn my dial, nothing updates on the screen. I have to mess with it for a couple minutes for it to finally move a little bit. Also It would seem the SD card pins are incorrect as well for my LCD. I can detect my SD card using a different arduino program with the following code, im not sure how to adopt it for makelangelo.
From the code you posted it looks like chip select is pin 53 (matches board_ramps.h) and sd card detect is 48 (board_ramps.h has 49 as the default). Look for
I had started from your Dec 23 commit with hash ca06a9ca702, but the repo was updated today, so I had to merge my changes into that. A fix for the “print from file” menu that I made today (lcd_dirty flag usage) that is unrelated to the encoder interrupts unfortunately got committed with it when I merged the code. The commit message explains what I did, and I’ll quote it below too.
Tylor, I’m using a 12864 LCD and RAMPS 1.4 and ran into the same issue where the knob/menus were unusable. So the first thing I did was fix that so I could explore the menus.
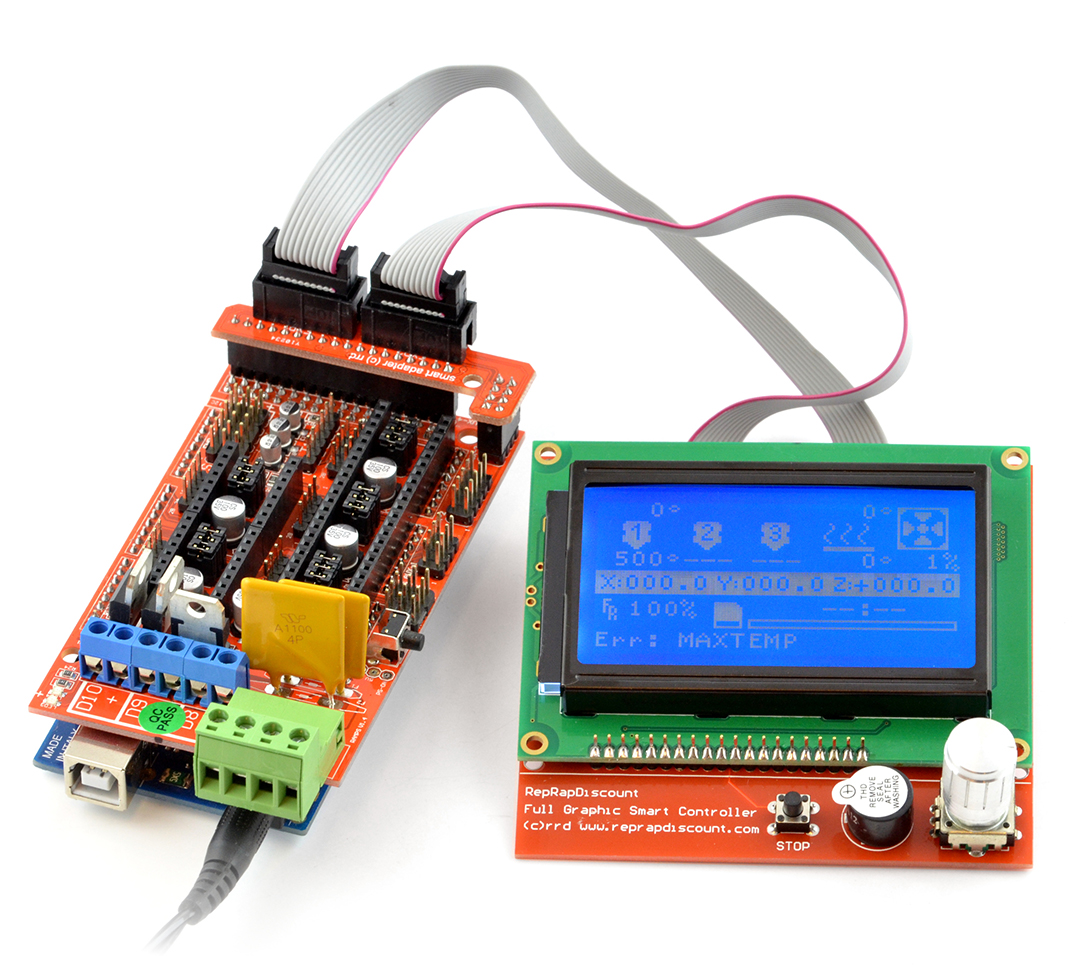
Smart LCD graphical display with SD card reader for RAMPS 1.4. This intelligent display includes an SD card reader, rotary encoders and a 128 x 64 dot matrix LCD display. You can easily connect it to your RAMPS 1.4 board using the "smart adapter" included.
With this intelligent display connected to your RAMPS 1.4, you do not need your computer to run your printer. The G-code is loaded onto a SD card and the printer runs from the SD card and a power supply. All further operations, such as calibration and the axis movement can be done through the rotary encoder control interface. This is total offline 3D printing!

There is no need to open a new Topic. However, because you had this bit in the same sentence as your comment about getting the screen working I nearly did not see it.
What do you mean by the "dial pot"? If you mean the rotatable device below the screen are you sure it is not a rotary encoder - that"s what is on my 3D printer.



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey